
Sextant Smartphone oder Tablet, mehr ist nicht nötig, um auf hoher See seinen Standort und Kurs mit der Sonne bestimmen zu können. Ein Schätzort muss nicht mehr angegeben wrden.
Astronomisch zu navigieren ist ein anregendes Hobby. Der Kartenplotter, auf den heute viel zu oft geblickt wird, bleibt einfach mal aus. Das Boot segelt schließlich nicht auf dem Bildschirm, sondern auf dem Meer und dahin sollte dann auch die ganze Aufmerksamkeit gehen. Wer heute auf seiner Segelyacht die Navigation mit einem Sextanten beherrscht, bewahrt die traditionsreiche Steuermannskunst und verdient gewiss ein großes Maß an Anerkennung als Könner zur See. Außerdem ist ein schöner Sextant mit eingraviertem Namen der Yacht ein passendes Statussymbol für den Skipper. Leider beherrschen nur noch ganz wenige die traditionelle Navigationskunst, was auf das jahrzehntelange Festhalten an einer Methode zurückzuführen ist, die schon längst nicht mehr in unsere Zeit passt.
Dabei ist es gar nicht so abwegig, auf See orientierungslos zu werden. Eine Batteriezelle kann taub werden, ist mir selbst schon passiert, oder ein Blitz kann einschlagen und die Navigationselektronik unbrauchbar machen. Eine Störung der Satellitensignale durch Sonnenstürme oder durch Jammer, die inzwischen Reichweiten von mehr als 200 km erreichen, ist auch nicht ganz auszuschließen. Letzteres wurde im Ukrainekrieg deutlich und an derartigen Techniken wird sogar intensiv weiterentwickelt. Unmöglich ist nichts. Ein professioneller Seefahrer geht deshalb nie ohne Backup in der Navigation auf große Reise, denn das Meer ist kein sicherer Ort. Ein Ausfall der elektronischen Navigation würde sein Schiff sofort ins 19. Jahrhundert zurückschicken.
Astronomisch mit der Sonne zu navigieren, ist mit der richtigen Methode ein Kinderspiel. Niemand muss dabei etwas rechnen, zeichnen, aus Tafeln heraussuchen oder irgend etwas von Astronomie oder Mathematik verstehen. Es besteht also kein Grund mehr, auf die astronomische Navigation als Alternative zu verzichten?
Dass jedes Handy einen Standort anzeigen kann, ist kein Ersatz für einen Kartenplotter. Die Kenntnis eines Standortes als Zahl bekommt erst dann einen Wert, wenn der Standort visualisiert auf einer Karte wiedergegeben wird und davon ein Kurs abgeleitet werden kann. So macht es auch nur Sinn, wenn ein astronomisch ermittelter Standort auf einer Karte wiedergegeben wird. Daraus entstand das Projekt “Circle of Position Navigation”
1 Projektgrundlagen
Im Unterschied zu Satelliten können Gestirne keine Funksignale aussenden, mit denen sie einem Empfänger ihre Entfernung mitteilen. Ihre Entfernung zu einem Beobachterstandort muss deshalb mit einem Sextanten von der Erde aus gemessen werden. Weitere grundsätzliche Unterschiede, außer in der Performance, gibt es nicht. Aus zwei Gestirnshöhen, die mit einem Sextanten gemessen werden, kann ein Standort genauso unspektakulär berechnet und auf einer elektronischen Karte angezeigt werden, wie in der Satellitennavigation. Das geht zwar nur im Takt von Sextantenmessungen und nicht im Sekundentakt und auch die Genauigkeit muss anders bewertet werden. Doch gerade auf längeren Strecken oder in einem Notfall kommt es darauf gar nicht an.
Ein Benutzer muss nichts weiter tun, als den auf dem Sextanten abgelesenen Winkel und die Beobachtungszeit eingeben. Das ist so einfach wie das Einstellen der Weckzeit auf einem Smartphone. Die Beschickung einer Sextantenablesung ist automatisiert und das Nautische Jahrbuch als Datenbank hinterlegt oder als Ephemeridenrechnung integriert. So kann dann wirklich jeder ohne Kenntnisse in Mathematik und Astronnomie mit Gestirnen navigieren, wie das bei der Satellitennavigation auch der Fall ist. Die Handhabung eines Sextanten muss natürlich gelernt werden. Das war aber nie das Hauptproblem. Die gesamte in der App verwendete Mathematik ist in folgenden zwei Dokumenten enthalten: Sun Navigation und Dead Reckoning.
2 Eine App zum Mitnehmen
 So entstand die erste App, mit der astronomisch mit dem Sextanten navigiert wird, in der die Auswertung der Meßwerte jedoch nach den Methoden der Satellitennavigation funktioniert. Ihr Name ist „Circle of Position Navigation“ und sie kann aus dem App Store und später auch aus dem Play Store heruntergeladen werden. Sie ist auf Mobilgeräten (Handy oder Tablet) mit den Betriebssystemen iOS und später auch Android funktionsfähig. Sie ermöglicht eine Navigation mit der Sonne. Die Sonne hat den Vorteil, mit keinem anderen Gestirn verwechselt zu werden, ist also ein sehr sicheres Navigationsgestirn. Sterne muss man identifizieren können, was Erfahrung voraussetzt. Ohnehin können Sterne nur in der Morgen- oder Abenddämmerung beobachtet werden, weil nachts der Horizont nicht zu sehen ist. Das wäre immer nur eine kurze Zeit, in der man sich schnell orientieren müsste. Der Mond ist am Tag nicht immer sichtbar. Nachts fällt er sogar ganz aus, denn sein Licht verschiebt die Kimm optisch nach unten, was auch die Beobachtung von Sternen unmöglich macht. Das alles führt letztlich zu dem Schluss, dass in einer App zum Navigieren für jedermann oder in einem als ad hoc verwendbaren Navigations Backup, die Sonne das einzig rationale Navigationsgestirn ist. In der App sind folgende Module enthalten:
So entstand die erste App, mit der astronomisch mit dem Sextanten navigiert wird, in der die Auswertung der Meßwerte jedoch nach den Methoden der Satellitennavigation funktioniert. Ihr Name ist „Circle of Position Navigation“ und sie kann aus dem App Store und später auch aus dem Play Store heruntergeladen werden. Sie ist auf Mobilgeräten (Handy oder Tablet) mit den Betriebssystemen iOS und später auch Android funktionsfähig. Sie ermöglicht eine Navigation mit der Sonne. Die Sonne hat den Vorteil, mit keinem anderen Gestirn verwechselt zu werden, ist also ein sehr sicheres Navigationsgestirn. Sterne muss man identifizieren können, was Erfahrung voraussetzt. Ohnehin können Sterne nur in der Morgen- oder Abenddämmerung beobachtet werden, weil nachts der Horizont nicht zu sehen ist. Das wäre immer nur eine kurze Zeit, in der man sich schnell orientieren müsste. Der Mond ist am Tag nicht immer sichtbar. Nachts fällt er sogar ganz aus, denn sein Licht verschiebt die Kimm optisch nach unten, was auch die Beobachtung von Sternen unmöglich macht. Das alles führt letztlich zu dem Schluss, dass in einer App zum Navigieren für jedermann oder in einem als ad hoc verwendbaren Navigations Backup, die Sonne das einzig rationale Navigationsgestirn ist. In der App sind folgende Module enthalten:
- Navigationsmodul
- Dead Reckoning Modul
- Kartenmodul
- TEST MODE Modul
Diese Module werden über fünf Menüs aktiviert und bedient. Ein Aufruf erfolgt über entsprechend Icons unten rechts auf dem Display. Über das Info-Icon kann auch eine Textdatei in englischer Sprache aufgerufen werden, in der die einzelnen Funktionen erklärt sind.
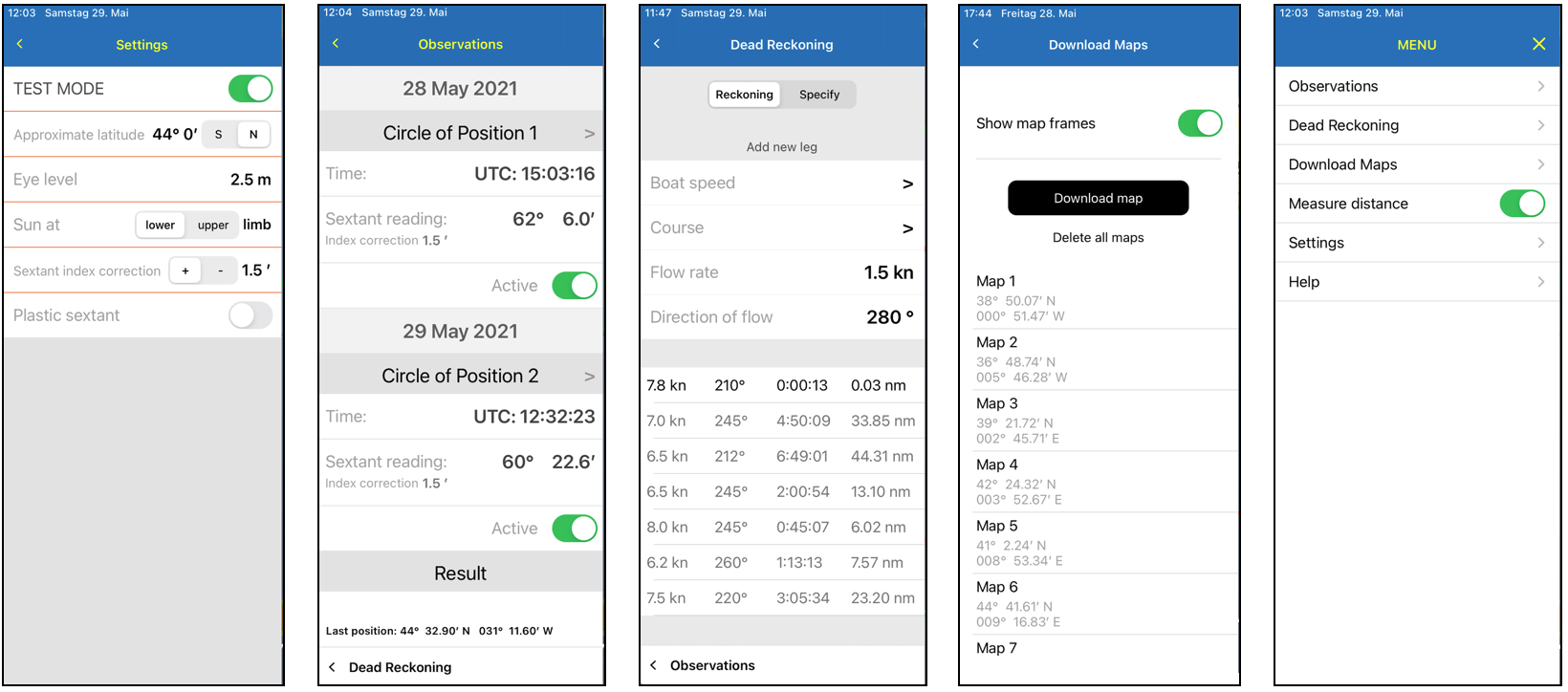
Im Menü Settings kann ein TEST MODE eingeschaltet werden. Dieser läuft völlig separat und sogar mit eigenen Grundeinstellungen. Er kann also jederzeit während einer aktuell laufenden Navigation nebenbei benutzt werden und eignet sich daher auch gut zum Testen weiterer Schritte in einer aktuell laufenden echten Navigation. Der Testmodus ist darüber hinaus ein beeindruckendes Instrument, um das Wesen der Astronavigation überhaupt kennenzulernen.
In den Einstellungen kann gewählt werden, ob der nördliche oder südliche Schnittpunkt der Höhengleichen als Standort berechnet werden soll, indem einfach irgend eine Breite nördlich oder südlich der aktuellen Deklination gewählt wird, z. B. 30° N oder 30° S. Die weiteren Einstellungen betreffen die Grunddaten einer Sextantenbenutzung.
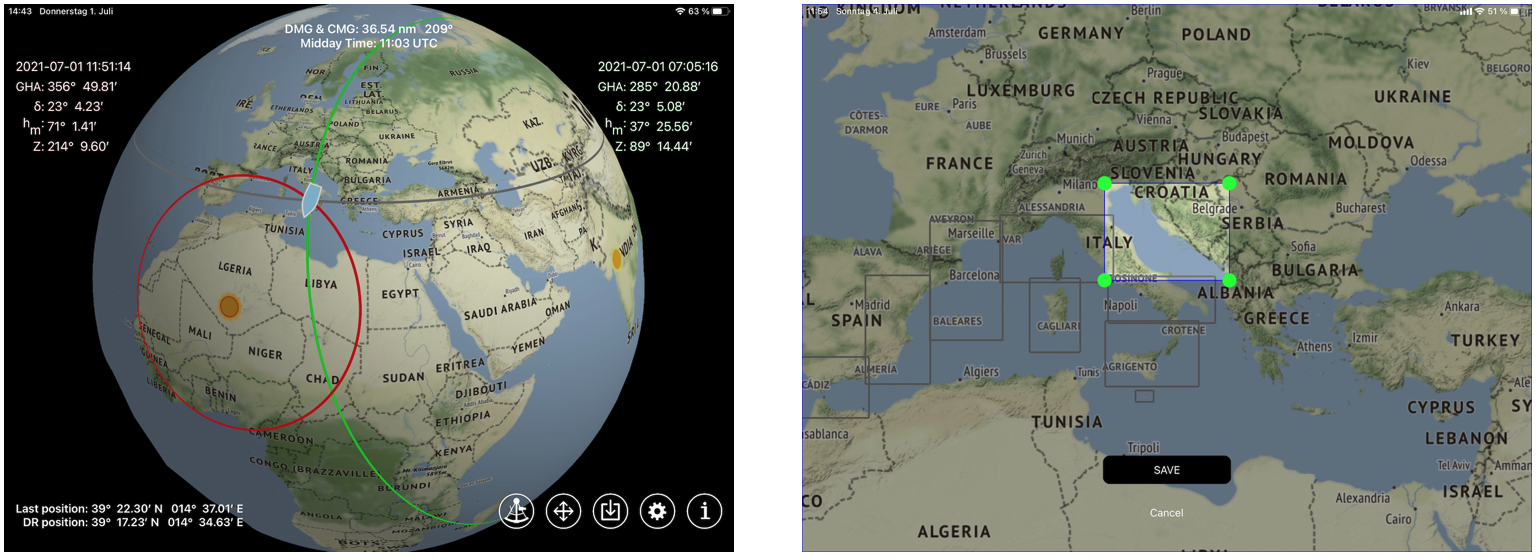
Mit dem Kartenmodul können Karten des beabsichtigten Segelgebietes online in größerer Auflösung heruntergeladen werden. Diese sind dann auch offline verfügbar. Ebenfalls offline verfügbar sind alle Kartenbereiche, in die online hineingezoomt wurde. Kartenrahmen können aus- oder eingeschaltet werden. So kann auch eine kleine Insel mit einem größeren Kartenrahmen umgeben werden, damit sie selbst in einem großen Kartenmaßstab immer noch markiert bleibt.
Das Modul Dead Reckoning (Koppelnavigation) wird benötigt, um eine Versegelung aufzuzeichnen. Bei einer Navigation mit der Sonne muss zwischen den Beobachtungen immer gewartet werden, bis die Sonne ihren Stand genügend weit geändert hat. Die in dieser Zeit zurückgelegte Distanz ist für eine Standortkorrektur nötig.
Nach jeder Wende, Halse oder nachhaltigen Geschwindigkeits- oder Kurskorrektur sollte dieses Modul zum Eintragen neuer Daten aufgerufen werden. Strömungsdaten werden nur eingerechnet, wenn ihre Werte sichtbar eingetragen sind. Mit den Eintragungen in diesem Modul verändert das Schiffssymbol auf der Karte seine Position. Jede Kurslinie ist im Trackverlauf sichtbar. Die jeweils erreichte Position wird bis zur Aktivierung einer neuen Sonnenhöhe als DR-Position ausgegeben.
Das Navigationsmodul besitzt zwei Eingabeblöcke für eine erste und eine zweite Beobachtung. In jedem Block müssen nur der Zeitpunkt der Beobachtung und der auf dem Sextanten abgelesene Winkel eingetragen werden. In jedem Block kann zwischen Circle of Position und Noon Latitude gewählt werden. Somit ist auch eine Positionsbestimmung mit Hilfe der Mittagsbreite möglich, was eine alte Segelschiffer-Tradition ist.
Wenn in den Einstellungen „Plastik Sextant“ gewählt wird, dann besteht die Möglichkeit, nach jeder Beobachtung einen neu festgestellten Indexfehler gleich im Navigationsmodul einzugeben. Bei Plastiksextanten ist das von Vorteil, denn ihr Indexfehler ist stark temperaturabhängig und kann von Messung zu Messung variieren.
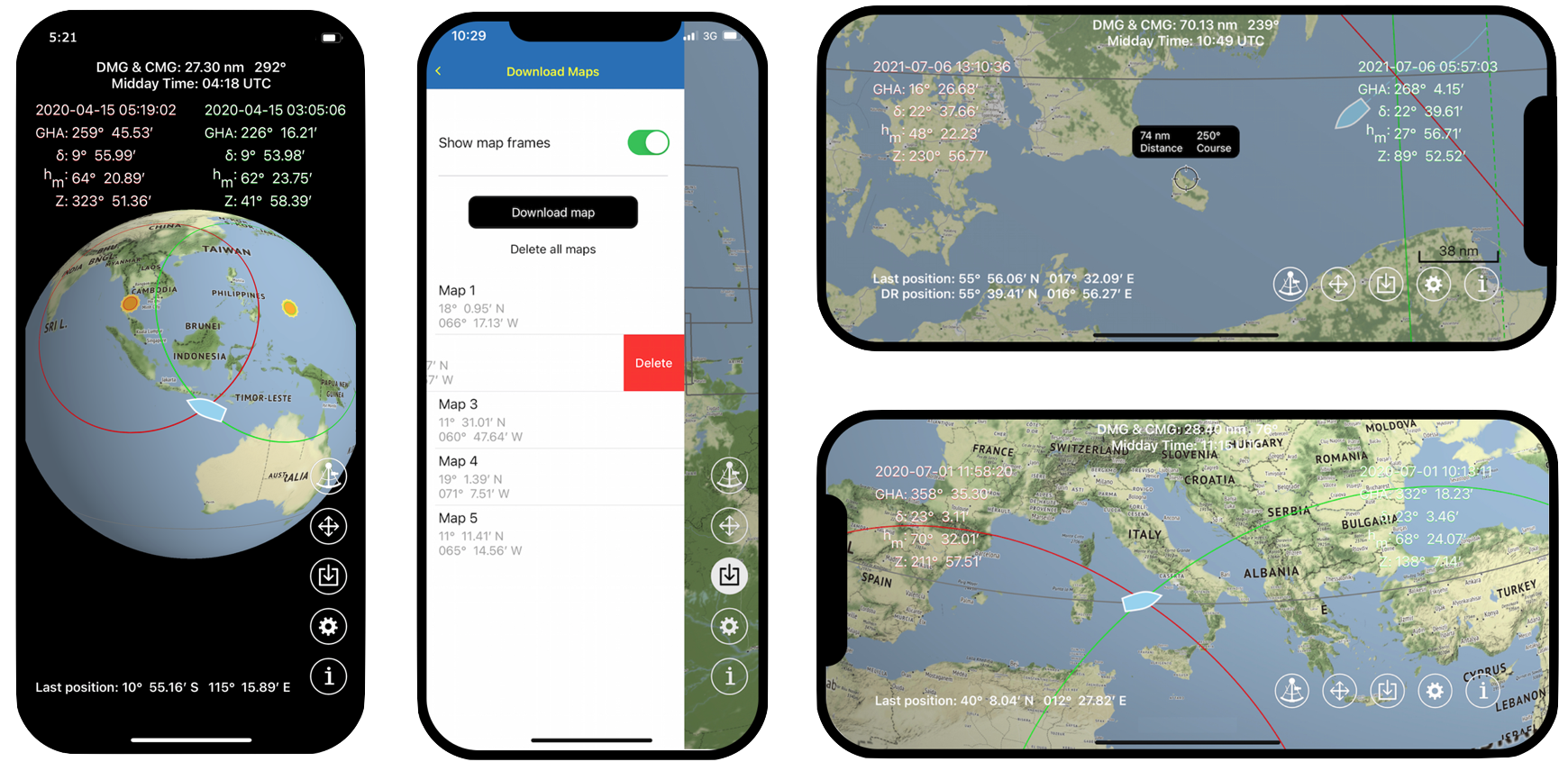
Die Grafik soll das Wesen der Astronavigation hervorheben: zwei Höhengleichen, die sich an zwei Stellen kreuzen, wobei eine Kreuzung der Standort ist. In der Satellitennavigation wird zur Identifikation der zutreffenden Kreuzung ein dritter Höhenkreis gebraucht. In der App muss angegeben werden, ob der nördliche oder der südliche Standort berechnet werden soll. Diese Eingabe erzeugt zunächst einen grauen Breitenkreis, der nach Feststellung eines Standortes auf die Standortbreite wechselt.
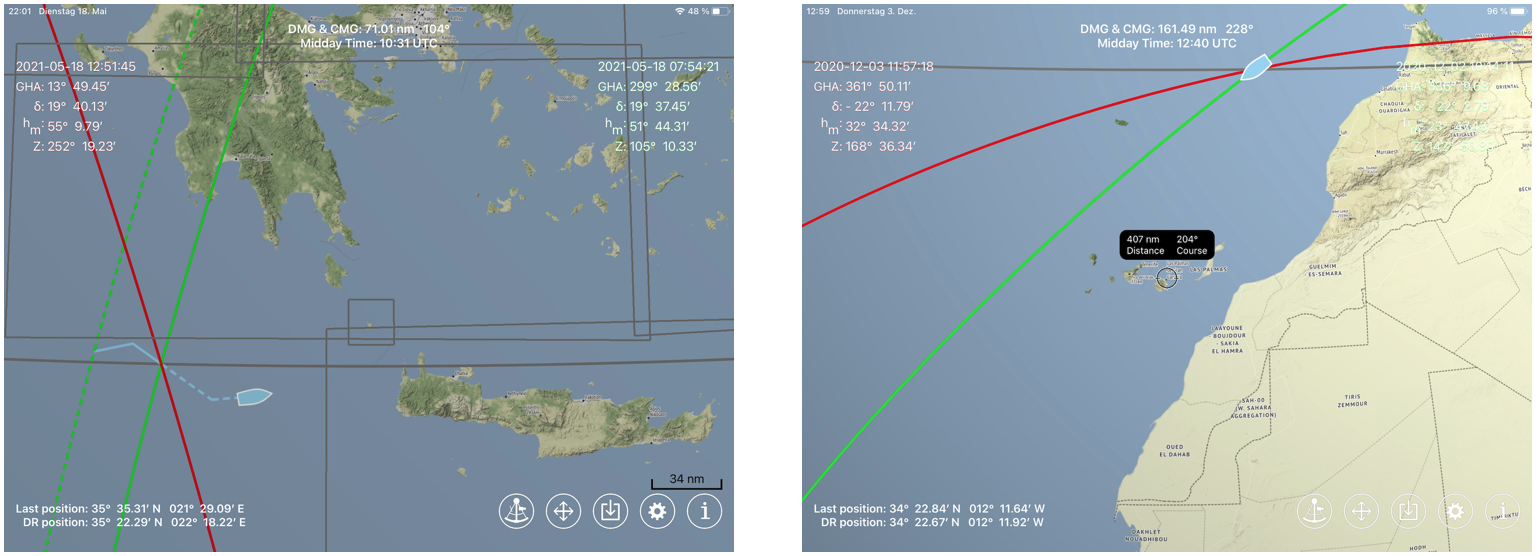
Der Höhenkreis der jeweils ersten Beobachtung wird grün dargestellt. Er bleibt auch grün zurück, wenn er versegelt wird, dann aber als gestrichelte Linie. Die Farbe der Höhenkreise von Zweitbeobachtungen ist rot. Aus dem Schnittpunkt des grünen mit dem aktuellen roten Höhenkreis wird der Standort berechnet. Der Track einer Koppelnavigation ist eine blaue Linie, wobei die Tracklinie nach einer letzten Standortberechnung als unterbrochene Linie auf Basis der Angaben im Dead Reckoning Modul weitergeführt wird und dabei den jeweiligen Kurslinien nach Wenden, Halsen oder Kursänderungen folgt. Eine festgestellte Mittagsbreite erscheint in der Farbe gelb.
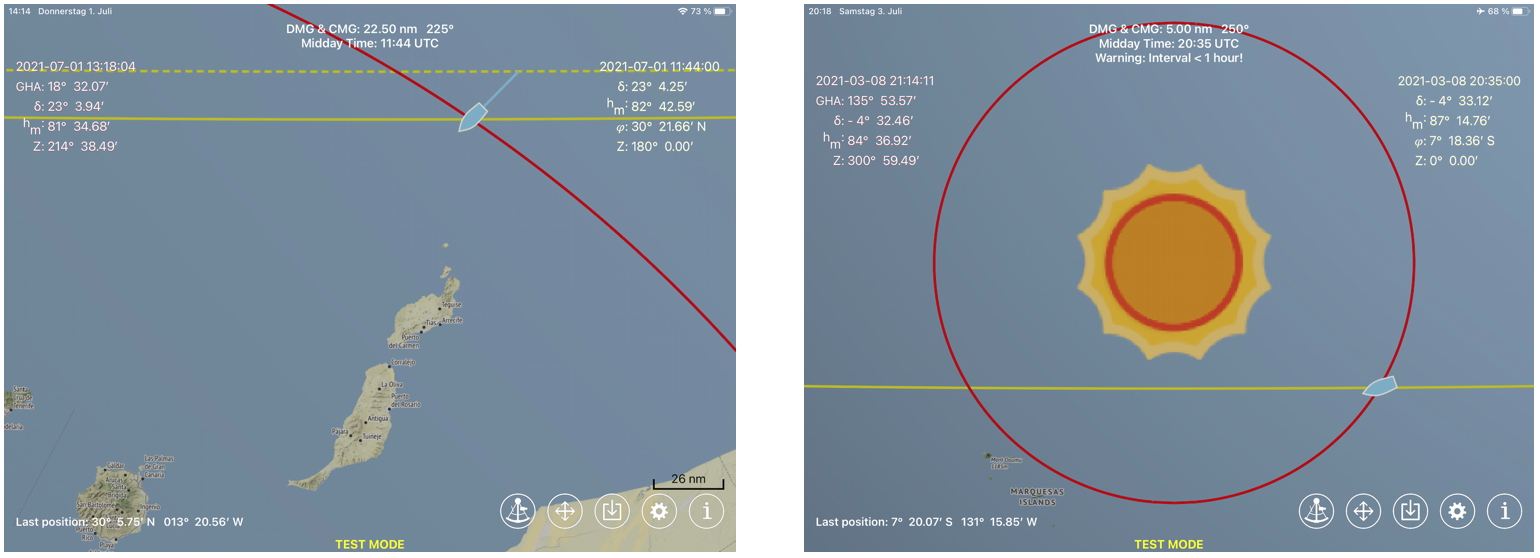
Links unten auf dem Display erscheinen die Ausgaben „Last position“ und „DR position“. Das sind die Positionen, der letzten Standortberechnung aus der Kreuzung der Höhengleichen sowie dem aktuellen Koppelort, der aus den Eingaben von Kurs, Geschwindigkeit und Strom berechnet wird. Oben in der Displaymitte werden die gefahrene Distanz made good und der gefahrene Kurs made good (DMG & CMG) ausgegeben. Darunter steht die berechnete Zeit des Schiffsmittags. Die erscheint jedoch erst nach einer zweiten Beobachtung. Ein berechneter Standort ist ebenfalls Voraussetzung für eine Entfernungsmessung, die im Menü ein- oder ausgeschaltet werden kann.
Zu jeder Beobachtung werden oben rechts und links zusätzliche Daten in Informationsblöcken ausgegeben. Das sind Datum und Uhrzeit, Greenwichwinkel und Deklination, wozu früher ein Nautisches Jahrbuch befragt werden musste, sowie die beobachtete Höhe und das Azimut.
3 Der Gauß’sche Algorithmus
Den Standort aus der Kreuzung von überlappenden Kreisen zu ermitteln ist das Ziel auch anderer Methoden, einschließlich der Satellitennavigation und hat speziell mit Gauß nichts zu tun. Der Gauß’sche Algorithmus ist ausführlich im Beitrag “Die Methode des Carl Friedrich Gauß” beschrieben. Deshalb wird hier nur ein kurzer Überblick gegeben.
Gauß war viele Jahre mit Landvermessungen beschäftigt und hatte die Aufgabe in seinen Karten Breiten- und Längengrade angeben zu müssen. Im Jahre 1809 fiel ihm dazu die Arbeit eines Herrn Kraft in die Hände. Darin beschreibt W. Kraft, wie aus der gemessenen Höhe zweier Sterne die geografische Breite berechnet werden kann. Seine Arbeit basierte auf der damals jedem Astronomen bekannten Modellvorstellung mit zwei Gestirnen, dem Erdpol, dem Standort und dem Äquator. Eine Berechnung des Breitengrades an diesem gezeichneten Modell galt damals als kompliziert. Doch es gab einen entscheidenden Unterschied zu vorangegangenen Berechnungsansätzen. W. Kraft benutzte nicht das gezeichnete visuelle Modell als Vorlage, sondern ein abstraktes Modell, ein Gleichungssystem, das die Zeichnung durch mathematische Formeln ersetzt und das war damals völlig neu. Herr Kraft schaffte es aber nicht, aus seinem Formelansatz eine zufriedenstellende Lösung zu präsentieren.
Der abstrakte mathematische Formelansatz anstelle eines gezeichneten Modells hat den Zahlenmann Gauß herausgefordert. Er präsentierte daraufhin eine Lösung, die zwar recht einfach, aber noch abstrakter war als der Ansatz und niemand in der Lage war, damit irgend eine Vorstellung zu verbinden. So ist der Gauß’sche Algorithmus in der Seefahrt nie zur Anwendung gekommen und ist in der nautischen Literatur auch nicht überliefert. Seine Formeln sind jedoch äußerst geschmeidig und bedingungslos verwendbar. Für eine Digitalisierung der Astronavigation ist die Methode von C. F. Gauß optimal.
Links:
nach oben ♦ Die Sonne am Himmel ♦ Mittagsbreite und Chronometerlänge ♦ Thomas H. Sumner, Begründer der Standliniennavigation ♦ Die Methode des Marcq Saint Hilaire ♦ Gauß und das Zweihöhenproblem ♦ Numerische Standortbestimmung ♦ Ein wenig Sextantenkunde ♦ Sextantentest Mark 25 ♦ Downloads ♦ Home