
Globale Ansicht einer Standortbestimmung
Die Epoche, in der auf allen Weltmeeren astronomisch navigiert wurde, ist mit der Einführung der Satellitennavigation beendet worden. Ein verantwortlicher Seemann muss jedoch über ein Navigations-Backup verfügen. Er muss in der Lage sein, bei Nichtverfügbarkeit von Satellitensignalen mit Gestirnen zu navigieren. Passiert nicht? Gerade hat ein Sonnensturm einige Satelliten einer Fernsehprogrammversorgung auf Talfahrt geschickt, wo sie dann verglüht sind und die Menge an Weltraunschrott nimmt ebenfalls ständig zu. “Sag niemals nie”, die Covid Pandemie war schließlich auch nicht vorhersehbar. Darüber hinaus gibt es auch andere Situationen, in denen ein Navigations-Backup wertvoll sein kann. Doch eine Navigationsmethode aus der alten Zeit, bei der gerechnet, gezeichnet und in Bergen von Tabellen rumgesucht werden muss, wird die Sicherheit auf See nicht verbessern können. Diese Methoden gehören ins Museum. Heute besitzen wir Mittel für ein Navigations Backup, das sich von einem Satelitensystem auf einem Kartenplotter bis auf die Performance gar nicht so sehr unterscheidet.
Aktuelle Situation
Als ich mein erstes seetüchtiges Boot hatte, gab es längst Satellitennavigation, doch ich wollte wie die alten Seefahrer navigieren können. So kaufte ich mir einen Sextanten und ein Buch, um zu lernen wie das geht und kam auch bald dahinter, wie ein Standort nach Marcq Saint Hilaire bestimmt wird. Nach der ersten Winterpause war dann jedoch fast alles wieder vergessen.
Der Aufwand im Vergleich mit der Satellitennavigation war gewaltig. Tabellenbücher, Papierkarten, Leerkarten, Taschenrechner und Zeichenutensilien sind im 21. Jahrhundert eigentlich eine Zumutung.
Doch es geht auch anders. Der Unterschied zwischen einem Stern und einem Satelliten besteht doch nur darin, dass ein Stern im Gegensatz zum Satelliten keine Funksignale aussendet, mit denen er einem Empfänger seine Entfernung mitteilt. Die Entfernung seines Bildpunktes zu einem Standort muss deshalb mit einem Sextanten von der Erde aus gemessen werden. Weitere Unterschiede, außer in der Performance, gibt es nicht. Einem Computer ist die Methode der Höhenmessung vollkommen egal. In beiden Fällen könnte er ganz unspektakulär den Standort berechnen und auf einer elektronischen Karte als Schiffssymbol anzeigen. Warum macht man das nicht schon lange?

Die weltweite Seefahrt hat 100 Jahre lang nur nach der Höhenmethode von Saint Hilaire navigiert. Diese Methode hat sich in dieser Zeit so fest etabliert, dass sie heute schon das Synonym für Astronavigation ist. Doch sie wurde sie aus einer Not heraus geboren, weil es keine Computer gab. Heute haben wir Computer und was tun wir? In Computerprogrammen zur Navigation ahmen wir die umständlichen Schritte der Standlinienkonstruktion von damals mit all ihren Nachteilen einfach nach.
So muss der eigene Standort zunächst geschätzt werden und Höhen über 75° können auch nicht, ohne größere Fehler befürchten zu müssen, verwendet werden. Schließlich bekommen wir als Ergebnis nicht mal den Standort, sondern einen Ort, der ein besserer Schätzort gewesen wäre.
Mal ehrlich, mit den Mitteln, die wir heute haben, ist es doch Unfug, sich in der astronomischen Navigation immer noch den Beschränkungen des 19. Jahrhunderts zu unterwerfen. Lange vor Hilaire hatte Carl Friedrich Gauß bereits gezeigt, wie ein Standort aus zwei Gestirnshöhen präzise berechnet werden kann. Doch das scheint vergessen zu sein.
Eine App zum Mitnehmen
![]() Die Gauß’sche Methode ist das präziseste Verfahren zur Standortbestimmung überhaupt und arbeitet direkt mit den Höhengleichen, wie die Satellitennavigation auch und so startete ich ein Projekt zur Entwicklung einer Navigations-App mit der Bezeichnung Circle of Position Navigation. Die App ist im App Store unter den Suchwörtern sextant oder celestial navigation zu finden. Eine Android Variante ist in Arbeit und soll bald folgen.
Die Gauß’sche Methode ist das präziseste Verfahren zur Standortbestimmung überhaupt und arbeitet direkt mit den Höhengleichen, wie die Satellitennavigation auch und so startete ich ein Projekt zur Entwicklung einer Navigations-App mit der Bezeichnung Circle of Position Navigation. Die App ist im App Store unter den Suchwörtern sextant oder celestial navigation zu finden. Eine Android Variante ist in Arbeit und soll bald folgen.

Die App ermöglicht das Navigieren nur mit der Sonne. Die Sonne kann mit keinem anderen Gestirn verwechselt werden, ist also ein sehr sicheres Navigationsgestirn. Sterne muss man identifizieren, was einige Erfahrungen voraussetzt. Sterne können auch nur in den Dämmerungen beobachtet werden, weil nachts der Horizont nicht zu sehen ist. Das wäre immer nur eine kurze Zeit, in der man sich schnell orientieren müsste. Der Mond ist am Tag nicht immer sichtbar. Nachts fällt er sogar ganz aus, denn sein Licht hebt die Kimm optisch an, was auch die Beobachtung von Sternen unmöglich macht. Das alles führt zu dem Schluss, dass in einem Navigations Backup, das ad hoc verwendbar sein muss, die Sonne das einzig rationale Navigationsgestirn ist. Beobachtungen der Sonne hatten sowieso schon immer einen Anteil von bis zu 90% aller Beobachtungen.
Was leistet die App?
Vor einer Reise müssen die Settings überprüft werden. Durch Eingabe einer Breite wird gewählt, ob der nördliche oder südliche Schnittpunkt der Höhengleichen als Standort berechnet werden soll. Hier ist anzugeben, ob man sich nördlich oder südlich von der aktuellen Deklination befindet. Die Angabe kann mit 30° N oder 30° S übertrieben werden. Zur Identifikation der zutreffenden Kreuzung wird in der Satellitennavigation ein dritter Höhenkreis eines dritten Satelliten gebraucht. Die weiteren Einstellungen betreffen die Daten einer Sextanten Benutzung.

Im Menü Settings kann ein TEST MODE eingeschaltet werden. Dieser läuft völlig separat und unabhängig, sogar mit eigenen Grundeinstellungen. Er kann parallel zu einer aktuell laufenden Navigation als Zweitsystem gestartet werden. Im TEST MODE kann die Auswirkung beliebiger Eingaben überprüft werden.
Das Menü Observations besteht aus zwei Blöcken für eine erste und beliebig viele folgende zweite Beobachtungen. In jedem Block müssen nur der Zeitpunkt einer Beobachtung und der auf dem Sextanten abgelesene Winkel eingetragen werden.
Hier kann auch zwischen Circle of Position und Noon Latitude gewählt werden. Dadurch ist auch eine Positionsbestimmung mit Hilfe der Mittagsbreite möglich, was eine alte Segelschiffer Tradition ist. Möglich ist auch ein Wechsel, bei dem eine Zweitbeobachtung auf den Platz einer Erstbeobachtung geschoben wird.
Die Sextantenbeschickung erfolgt automatisch. Dazu greift das Programm auf eine Datenbank zu. Das gleiche gilt für den Greenwichwinkel und die Deklination, deren Werte bis zum Jahr 2040 in einer Datenbank hinterlegt sind. Ein Nautischer Almanach ist also nicht erforderlich.
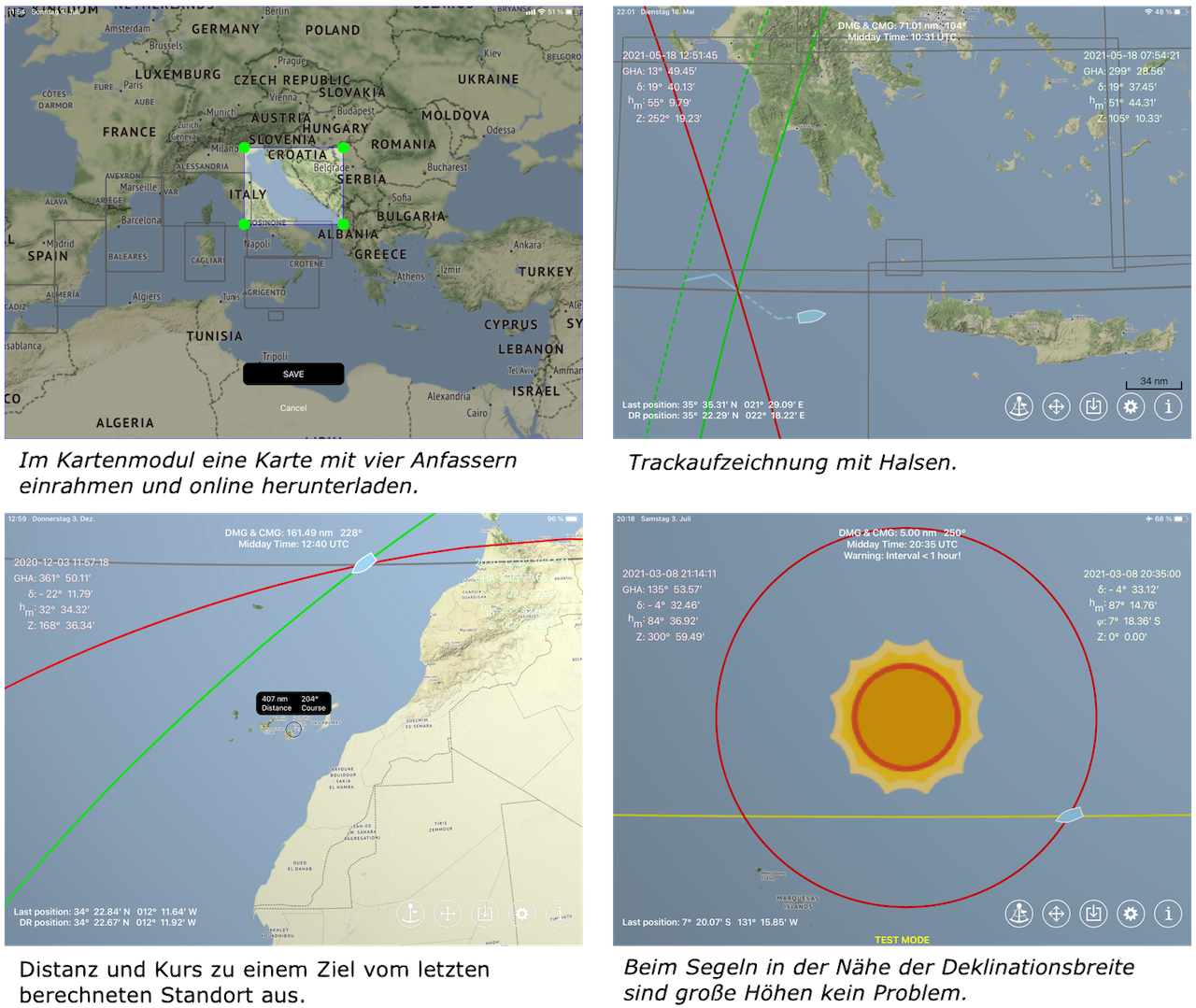
Mit dem Modul Dead Reckoning kann eine Versegelung genau aufgezeichnet werden. Ortsveränderungen zwischen den Beobachtungen werden bei einer Navigation mit der Sonne für eine Standortkorrektur benötigt. Nach jeder Wende, Halse oder nachhaltigen Geschwindigkeits- oder Kurskorrektur sollten deshalb die neuen Daten eingegeben werden. Angaben von Meeresströmungen werden nur in den Zeitspannen eingerechnet, in denen sie sichtbar eingetragen bleiben. Wird Specify gewählt, dann fragt das Modul nach dem zurückgelegten Schlag seit der ersten Beobachtung, sobald eine zweite Beobachtung aktiviert wird.
Ein Kartenmodul ermöglicht online ein Herunterladen der Karten des beabsichtigten Segelgebietes in größerer Auflösung. Diese Karten sind danach offline verfügbar. Ebenfalls offline verfügbar sind alle Kartenbereiche, in die online hinein gezoomt wurde.
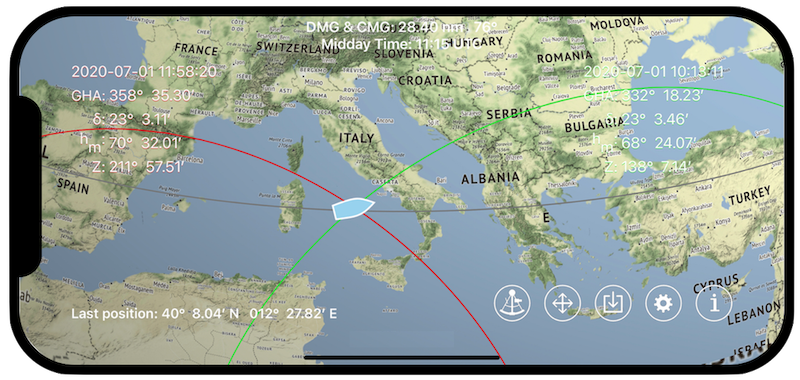
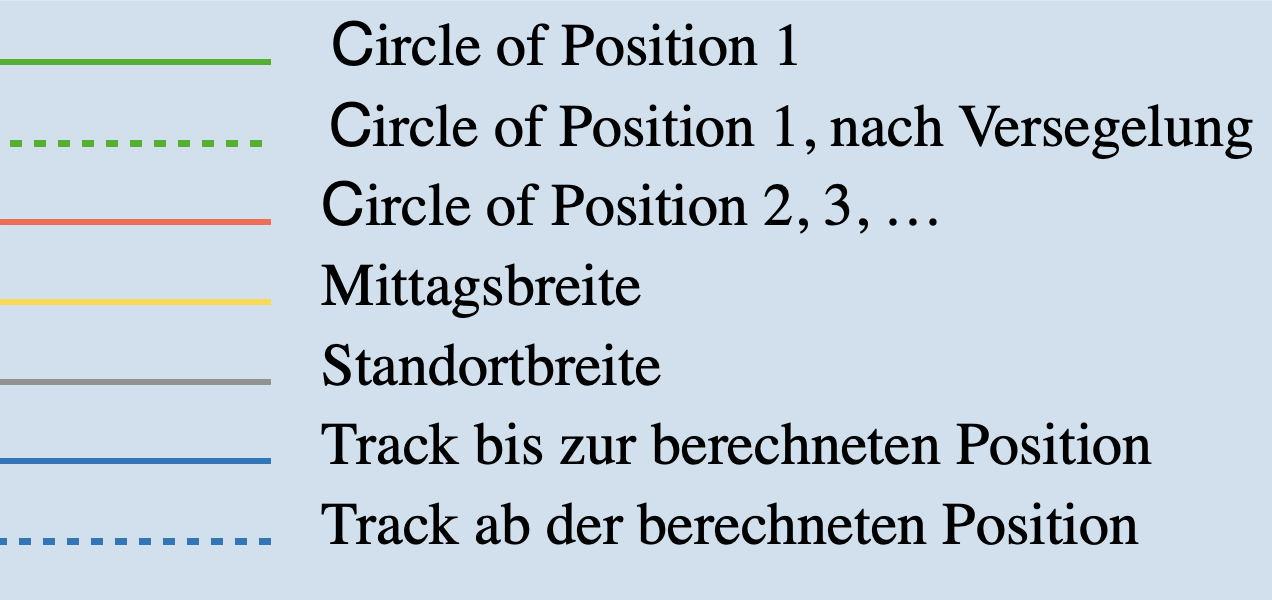
Die Grafik hebt das Wesen der Astronavigation hervor: Zwei Höhengleichen, die sich an zwei Stellen kreuzen, wobei eine Kreuzung der Standort ist. Alle Linien in der Grafik haben eine bestimmte Bedeutung, die durch Farben und Form gekennzeichnet sind.
Die Methode von Gauß
Die wahre Gauß Methode ist in der nautischen Literatur nicht überliefert. Wir werfen deshalb einen kurzen Blick auf ihre Geschichte.
Im 16. Jahrhundert benutzte Tycho Brahe, ein dänischer Astronom, ein Verfahren, womit er die Position eines unbekannten Sterns aus den Positionen zweier bekannter Sterne ableiten konnte. Dieselbe Konstellation liegt auch vor, wenn der Zenit einer unbekannten Schiffsposition aus den Positionen zweier bekannter Himmelskörper abzuleiten wäre. Die Positionen von Zenit an der Himmelskugel und Bildpunkt auf der Erde sind schließlich identische Projektionen.
Daraus entstand die Suche nach einer mathematisch einfachen Lösung des sogenannten Zweihöhenproblems. An der Suche beteiligten sich berühmte Mathematiker und Wissenschaftler wie Leonhard Euler und Daniel Bernoulli. Doch Mathematik gehörte damals nicht zum Handwerk eines Seemannes und so gelang es nicht, eine praktikable seetaugliche Lösung zu finden.
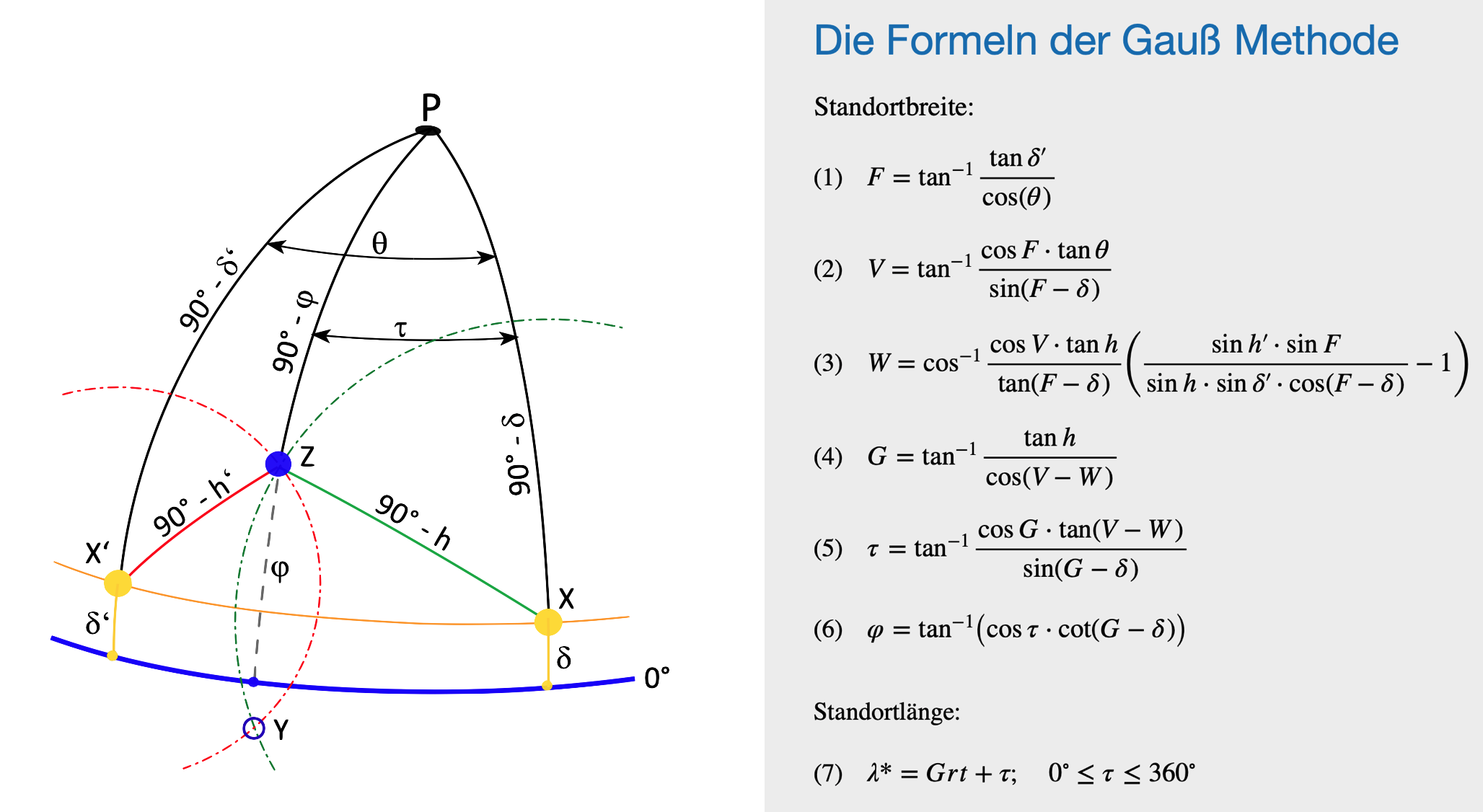
Die Suche nach Lösungsmöglichkeiten war damals für viele eine intellektuelle Herausforderung. Während zahlreiche Autoren unter Vermeidung der sphärischen Trigonometrie nach Methoden suchten, die Breite ϕ aus anderen Elementen eines an sich bekannten grafischen Modells zu berechnen, ging Carl Friedrich Gauß einen ganz anderen Weg. Er benutzte statt eines visuellen ein abstraktes Modell. Das war ein Gleichungssystem, mit dem die Zeichnung eindeutig beschrieben war. In diesem Gleichungssystem sind die Breite φ und der Stundenwinkel  die zu berechnenden Unbekannten. Seine Auflösung aus dem Jahre 1808 bestand aus 6 übersichtlichen Formeln, die sogar eine direkte logarithmische Berechnung ermöglicht hätten. Die Lösungsformeln waren allerdings noch viel abstrakter als der Formelansatz und niemand war in der Lage, daraus eine Vorstellung abzuleiten. Gauß war seiner Zeit viel zu weit voraus.
die zu berechnenden Unbekannten. Seine Auflösung aus dem Jahre 1808 bestand aus 6 übersichtlichen Formeln, die sogar eine direkte logarithmische Berechnung ermöglicht hätten. Die Lösungsformeln waren allerdings noch viel abstrakter als der Formelansatz und niemand war in der Lage, daraus eine Vorstellung abzuleiten. Gauß war seiner Zeit viel zu weit voraus.
Gauß berechnete auch den Stundenwinkel , der nach Addition mit dem Sternwinkel die Zeit liefert, woraus der Längengrad bestimmt werden konnte. Allerdings geht diese berechnete Zeit aus den Beobachtungszeiten hervor. Es ist also nicht so, dass mit der Gauß Methode auch der Längengrad ohne Chronometer bestimmbar wäre.
Die Formeln sind in ihrer Anwendung optimal. So muss nicht berücksichtigt werden, ob die Höhen vormittags oder nachmittags beobachtet wurden oder ob die Beobachtungszeiten über ein aktuelles Datum hinausgehen.
Nach heutigem Verständnis beträgt die in Grad angegebene Zwischenzeit der Beobachtungen ???? = Grt’ – Grt. Der südliche Schnittpunkt Y der Höhenkreise wird gefunden, indem W als negativer Wert verwendet wird.
Ein Spezialfall ist die Höhenmessung an aufeinanderfolgenden Tagen, wenn gleichzeitig die zweite Beobachtung zu einer früheren Tageszeit erfolgt. Beispiel: Erste Beobachtung Nachmittags erst um 17:00 UT1 möglich und zweite Beobachtungsmöglichkeit am Folgetag um 14:00 UT1.In diesem Falle erhält man ein richtiges Ergebnis, indem W und ein negatives Vorzeichen erhalten.
Die Standortlänge ist die Summe von und dem Greenwichwinkel Grt und muss nur noch auf Westlängen (-λ) und Ostlängen (360° – λ) aufgeteilt werden.
Die Gauß Methode ist ideal für eine Digitalisierung. Man benötigt keine Standortschätzung, es besteht keine Höhenbegrenzung und das Ergebnis ist mathematisch exakt.