![]() In der Steuermannskunst besitzt die astronomische Navigation eine lange Tradition. Nach ihrer Ablösung durch die Satellitennavigation haben Verbände, Institutionen und Verwaltungen vieler Länder versucht, diese Tradition als Notfalloption weiterleben zu lassen. Das ergab grundsätzlich Sinn. Der Aspekt, dass dazu die astronomische Navigation jedoch im alten Stil, nämlich grafisch, mit Sextant, Papierseekarte und einem ganzen Packen von Tabellen und Büchern ausgeführt werden sollte, hat ihrer Akzeptanz dann doch nicht gutgetan.
In der Steuermannskunst besitzt die astronomische Navigation eine lange Tradition. Nach ihrer Ablösung durch die Satellitennavigation haben Verbände, Institutionen und Verwaltungen vieler Länder versucht, diese Tradition als Notfalloption weiterleben zu lassen. Das ergab grundsätzlich Sinn. Der Aspekt, dass dazu die astronomische Navigation jedoch im alten Stil, nämlich grafisch, mit Sextant, Papierseekarte und einem ganzen Packen von Tabellen und Büchern ausgeführt werden sollte, hat ihrer Akzeptanz dann doch nicht gutgetan.
Während in der Satellitennavigation von Beginn an die damals schon massenhaft zur Verfügung stehende Computertechnik eingesetzt wurde, fand eine umfassende Digitalisierung in der astronomischen Navigation einfach nicht statt. Ausgerechnet zu dem Zeitpunkt, als mit dem Computer endlich das Werkzeug zur Verfügung stand, das sich die Klassiker der astronomischen Navigation sehnlichst gewünscht hätten, wurde darauf verzichtet.
Der Unterschied zwischen Satellitennavigation und Astronavigation besteht lediglich darin, dass natürliche Himmelskörper keine Funksignale aussenden können, mit denen sie einem Empfänger ihre Entfernung mitteilen. Ihre Bildpunkt-Entfernung muss deshalb mit einem Sextanten von der Erde aus gemessen werden. Andere Unterschiede – außer natürlich in der Performance – gibt es allerdings nicht.
Nautische Jahrbücher und HO 249 Tafeln, Taschenrechner, Papierseekarten, Zeichenutensilien und Lehrgangsbesuche braucht es also überhaupt nicht mehr, damit jemand seinen globalen Standort mit einem Gestirn bestimmen kann. Man benötigt dasselbe wie zur Satellitennavigation auch, nämlich ein Display mit einer elektronischen Karte und einem Programm im Hintergrund. Allerdings muss ein Sextant benutzt werden, was man aber auch sportlich sehen kann.
Zu Unrecht wird in unserer Zeit die Bedeutung der Astronavigation gar nicht mehr ernst genommen. Doch noch gibt es sie. Neben ihrer Verwendung als Hobby ist ihre weitere Funktion die Notfallnavigation. Als solche ist sie jedoch nur tauglich, wenn sie in einem urplötzlich entstehenden Notfall von jedermann ad hoc und ohne vorherige Anleitung problemlos nutzbar ist. Das trifft leider für keine der bisher geübten Varianten des Zweihöhenverfahrens zu, und hier liegt das Problem.
Für eine Notfallnavigation ist auch nur die Sonne der ideale Navigationsstern, weil sie unverwechselbar ist. Über alle Zeiten gesehen entfallen sowieso etwa 90 % aller Standortbestimmungen auf Sonnenbeobachtungen. Die Sonne steht den ganzen Tag zur Verfügung, während Sterne und Planeten nur in den kurzen Zeiten der Dämmerung beobachtet werden können. Ein hell scheinender Mond in der Nacht täuscht eine Kimm vor, die ein ganzes Stück tiefer liegt als die wahre Kimm. Das macht ein Navigieren unmöglich. Die Sonne besitzt außerdem den Vorteil, dass ihr Licht das Ablesen des Sextanten sehr erleichtert.
Die Android-App steht in zwei Versionen zur Verfügung, in einer kostenlosen Sun Navigation Basic und einer kostenpflichtigen Sun Navigation Pro. Grundsätzlich ermöglicht die Basic-Version eine globale Standortbestimmung auf einer elektronischen Karte und erfüllt damit als Notfallnavigation alle daran zu stellenden Anforderungen.
Die App nutzt zur Standortberechnung die Methode von Carl Friedrich Gauß aus dem Jahre 1809. Sie ermöglicht direkte Standortberechnungen aus zwei Beobachtungen, ohne vorherige Standortschätzung, mit großer Genauigkeit. Es ist nämlich keine Näherungsmethode. Beide Apps laufen auf Android Tablets und Android Smartphones mit Betriebssystemen ab Version 5. Eine iOS-Version existiert ebenfalls. Die Professional-Version enthält gegenüber der Basis-Version eine Reihe zusätzlicher Funktionen.
- unabhängiges Zweitsystem für beliebige Eingaben
- Einbeziehung der Mittagsbreite
- Download von Karten des Segelgebietes in hoher Auflösung
- Recorder zur Aufzeichnung einer Versegelung
- Sun Almanach mit 0,1’ Genauigkeit
- Beobachtung über drei Tage möglich
- Beobachtung der Sonne auch am Oberrand
- ständige Anzeige einer DR-Position
- ständige Ausgabe von DMG, CMG und VMG
- Großkreisberechnung von Distanz und Anfangskurs zu einem Ziel
Sun Navigation Base
Nach dem Start der App erscheint ein EröffnungsBildschirm mit dem Funktionsnamen „Circle of Position Navigation“, der im Bild 1 gezeigt wird. Circle of Position bedeutet Positionskreis und das Folgewort Navigation besagt, dass ein Standort direkt aus dem Schnittpunkt zweier Höhengleichen bzw. Höhenkreise berechnet wird. Das ist ein wesentlicher Unterschied zu dem grafischen Höhenverfahren von Saint Hilaire, bei dem die wahren Höhenkreise in einem vorher zu schätzenden Standortbereich durch gradlinige Standlinien ersetzt werden. Dies ist auch einer der Gründe für die höhere Standortgenauigkeit der App. Über die Schaltfläche HELP kann eine Hilfedatei aufgerufen werden, in der die einzelnen Funktionen in englischer Sprache erklärt sind.
Über die Schaltfläche Navigation gelangt man nach Bestätigung eines Warntextes auf den HauptBildschirm, der zunächst nur den Erdglobus anzeigt. Der Warntext ist ebenfalls in englischer Sprache verfasst. Die Übersetzung lautet:
Elektronische Daten sind lediglich als Hilfsmittel für die Navigation zu verwenden. Sie dürfen nur als Ergänzung zu offiziellen Quellen und traditionellen Navigationsmethoden verwendet werden.
Sichere Navigation bedeutet die ständige Überprüfung der verschiedenen Informationsquellen. Wenn diese nicht übereinstimmen, muss der Grund dafür gefunden werden.
In der Vorbereitung größerer Fahrten müssen elektronische Kartendarstellungen mit Papierkarten und Handbüchern abgeglichen werden. Zum Beispiel mit der Serie PUB. xxx SAILING DIRECTIONS.
Eine Zoom-Option in elektronischen Daten ist nicht geeignet, um Gefahren zu erkennen.
Die Verwendung dieser App erfolgt auf eigene Gefahr. Die Grundsätze der guten Seemannschaft müssen in allen Situationen beachtet werden. Der Herausgeber dieser App haftet nicht für Schäden, die durch eine unsachgemäße Verwendung der App entstehen.
Settings
Durch das Antippen des Symbols für Einstellungen öffnet sich die Leiste Settings, wie es Bild 2 zeigt. Hier müssen zunächst einige Grundeinstellungen vorgenommen werden. Ganz oben befindet sich ein Schalter, mit dem ein TEST MODE gewählt werden kann. Dieser steht jedoch nur in der Pro-Version zur Verfügung. In der darunterliegenden Zeile wird mit Approximate Latitude gefragt, auf welcher Breite man sich gerade befindet.
Mit dieser Breite muss nur angegeben werden, ob der aktuelle eigene Standort nördlich oder südlich von der momentanen Deklinationsbreite liegt. Mit einer Angabe von beispielsweise 30° N wählt man ein Segelgebiet, das sich nördlich jeder möglichen Deklinationsbreite befindet, und es wird erstmalig immer der nördlich gelegene Schnittpunkt der sich schneidenden Höhenkreise berechnet. Die eingegebene Breite wird nach ihrer Eingabe sofort als grauer Breitenkreis angezeigt, wie es in den nachfolgenden Bildern auch zu sehen ist.
Die in den Settings eingestellte Breite wird später nach jeder neuen Standortberechnung mit der tatsächlichen Standortbreite überschrieben. Der Breitengrad, auf dem man sich gerade befindet, reist auf diese Weise sozusagen mit.
Die weiteren Angaben betreffen den verwendeten Sextanten und dessen Benutzung. Mit dem Wert Eye level wird in Metern angegeben, wie hoch die Achse des Fernrohrs des Sextanten bei einer Beobachtung über der Wasserlinie liegt. Einzugeben ist der Abstand zwischen Fernrohr und Wellenkamm.

In der Basic-Version kann die Sonne nur mit ihrem unteren Rand auf den Horizont gesetzt werden. Die Eingabe unter Sun at kann in der Basic-Version also nicht geändert werden.
Unter Sextant index correction wird nicht der Indexfehler des verwendeten Sextanten eingetragen, sondern der Wert, um diesen zu korrigieren. Folglich ist das dann der negative Wert eines Indexfehlers.
Der Indexfehler ist leicht herauszufinden, indem zunächst Gradbogen und Trommelnonius auf null gestellt werden. Wird der Horizont in dieser Einstellung beobachtet, dann werden bei einem Indexfehler zwei übereinanderliegende Horizontlinien gesehen. Diese müssen jetzt mit der Trommel in Deckung gebracht werden. Der anschließend abgelesene Winkel ist der Indexfehler. Sein Wert wird nun mit umgekehrtem Vorzeichen als Indexkorrektur eingetragen.
Der Indexfehler sollte bei Metallsextanten einmal monatlich überprüft werden. Bei Plastiksextanten ist eine Korrektur unmittelbar vor oder nach einer Beobachtung notwendig.
Der Schalter Plastic sextant in der untersten Reihe hat die praktische Funktion, dass eine Indexkorrektur bei der Verwendung von Plastiksextanten direkt in der Menüleiste von Observations eingegeben werden kann. Bei Plastiksextanten schwankt der Indexfehler zwischen den Beobachtungszeiten aufgrund unterschiedlicher Umgebungstemperaturen teilweise erheblich, wodurch Indexkorrektur und Beobachtung praktisch zusammenhängende Tätigkeiten sein müssen.
Mit diesen Grundeinstellungen ist die App klar zum Navigieren. Durch das Antippen des Icons mit dem Sextantensymbol wird das Menü Observations geöffnet, das im Bild 3 zu sehen ist. Hier werden jetzt die erforderlichen Eingaben vorgenommen. Das sind für jede Beobachtung das Datum, das außer im TEST MODE automatisch vorgegeben wird, die sekundengenaue Beobachtungszeit und die auf dem Sextanten abgelesene Höhe einer Sonnenbeobachtung.
Observations
Circle of Position 1
Die Benutzung der App wird jetzt ausführlich anhand eines Beispiels erklärt.
Während einer Fahrt im Mittelmeer wurde am 1. Juli 2024 die im Bild 3 bereits eingetragene erste Beobachtung vorgenommen. Das Datum ist das Tagesdatum der Beobachtung und wird vom Gerät vorgegeben. Es kann somit nicht geändert werden. Unter Circle of Position 1 steht unter Time die sekundengenaue Zeit, in der die Sonne im Fernrohr des Sextanten auf den Horizont gesetzt wurde, und in der darunter liegenden Zeile Sextant reading befindet sich der am Sextanten abgelesene Höhenwinkel. Die Daten lauten für Time 10:08:33 UTC und für Sextant reading 68° 59,8’. Die Daten sind bereits mit dem zugehörigen Schalter Active aktiviert worden.
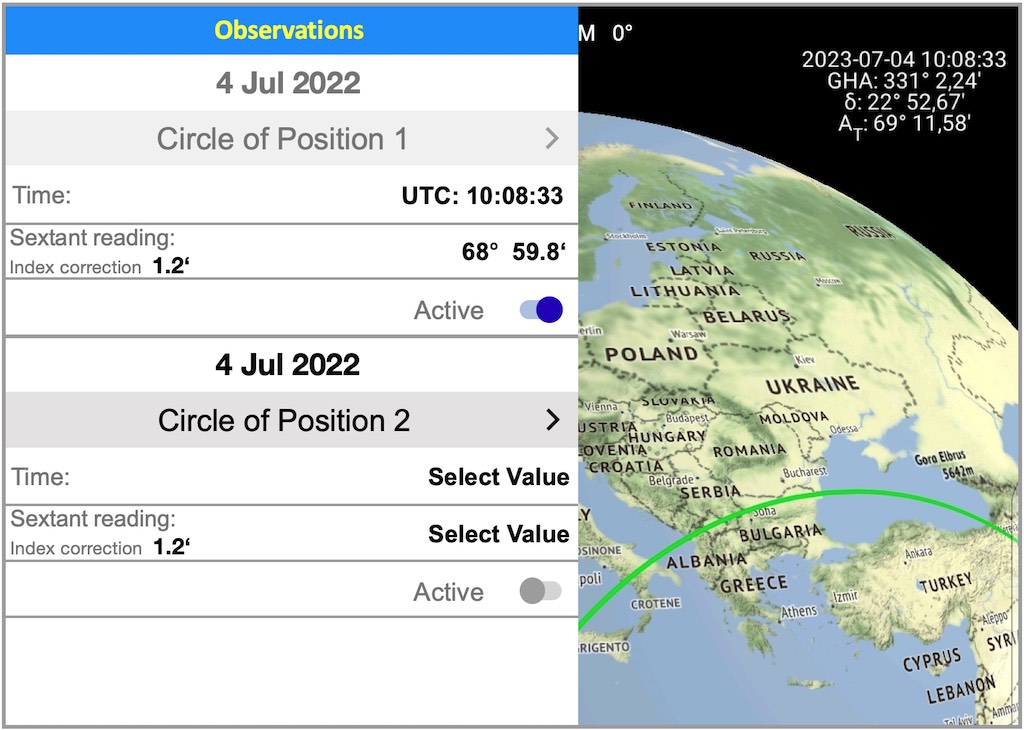
Nach Antippen des rechts auf dem Display sichtbaren Kartenteils oder durch nochmaliges Antippen des Sextanten-Icons verschwindet das Menü und das Display zeigt nur noch die Karte, wie sie im Bild 4 zu sehen ist.

Aus Datum und Uhrzeit berechnet die App den Greenwichwinkel GHA (dt. Grt) mit 331° 8,50’ und die Deklination δ mit 23° 3,22’. Die erforderliche Sextantenbeschickung wird aus den in den Settings hinterlegten Eingaben für Augeshöhe und Indexfehler sowie aus dem Datum und der gemessenen Höhe berechnet. Das Datum ist wichtig für die sogenannte Zusatzbeschickung.
Weil die Höhe der Sonne an ihrem unteren Rand gemessen wird, für die wahre Höhe jedoch die Mitte der Sonnenscheibe gilt, muss der Winkel des halben Sonnendurchmessers von dem am Sextanten abgelesenen Wert abgezogen werden. Der Durchmesser der Sonnenscheibe ist aber nicht konstant. Wenn im Winter auf der Nordhalbkugel die Sonne auf ihrer elliptischen Bahn der Erde am nächsten kommt, dann ist ihr Durchmesser optisch etwas größer, was korrigiert werden muss.
Die unter Eye level eingetragene Augeshöhe dient zur Korrektur der Kimmtiefe. Je höher man steht, desto weiter kann man blicken. Infolge der Erdkrümmung schaut man auch auf immer tiefer liegende Flächen, wodurch der Höhenwinkel zur Sonne zu groß ausfallen würde.
Schließlich wird aus der gemessenen Höhe noch ein Refraktionsfehler berechnet, der durch Lichtbrechung in der Atmosphäre entsteht. Mit dieser Beschickung, die zur Sextantenablesung addiert wird, ergibt sich eine beobachtete Höhe von AT = 69° 12,61’ (AT = True Altitude).
Diese Daten werden nur als Information oben rechts im Display angezeigt.
Sobald die Daten einer ersten Beobachtung aktiviert sind, können diese nicht mehr geändert werden. Sollten Änderungen nötig sein, z. B. aufgrund eines Tippfehlers, dann ist dazu ein Neustart auszuführen. Zu diesem Zweck wird der Schalter Active betätigt und mit start werden alle bisherigen Eingaben gelöscht. Danach muss alles neu eingegeben werden.
Circle of Position 2
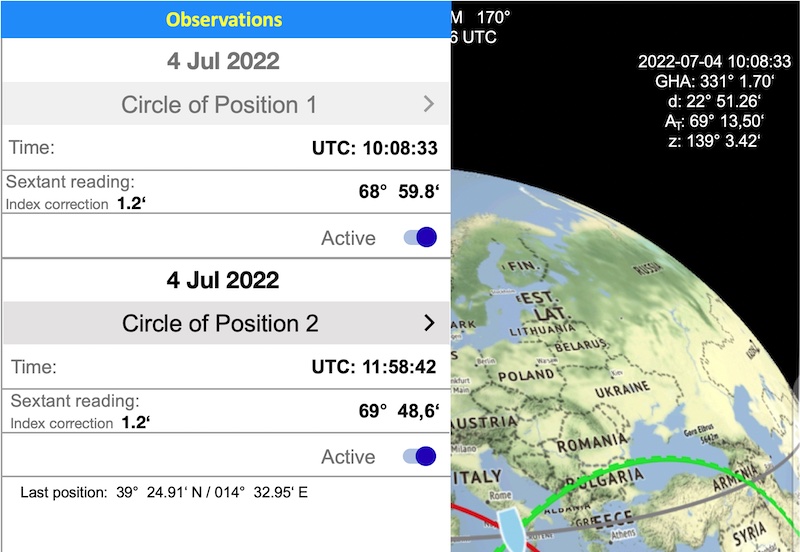
Um 11:58:42 UTC erfolgte eine zweite Beobachtung, wobei die Sonne im Teleskop mit einem Sextantenwinkel von 69° 48,6’ auf den Horizont gesetzt wurde. Die festgestellte Zeit und die Sextantenablesung werden nun im Block Circle of Position 2 eingetragen, wie dies im Bild 5 zu sehen ist. Nach Betätigen des Aktivierungsschalters, öffnet die App automatisch das Menü Dead Reckoning, damit eine Versegelung berücksichtigt werden kann. Dieses Dead-Reckoning-Menü ist im Bild 6 zu sehen.
Unter Versegelung wird die Ortsveränderung in der Zeit zwischen der ersten und einer folgenden Beobachtung verstanden. Diese Ortsveränderung muss durch eine Koppelnavigation (engl. Dead Reckoning) erfasst werden. In der Basis-Version der App muss man leider „zu Fuß“ koppeln. Dazu werden die Distanz der Ortsveränderung über Grund (DMG = Distanz Made Good) und der mittlere gefahrene Kurs über Grund (CMG = Course made Good) aus während der Fahrt zu machenden Notizen abgeschätzt. Notiert werden immer die Dauer von Geschwindigkeiten auf den verschiedenen Kursen sowie das Abdriften durch Wind und Strömung. Diese Dinge wurden in alten Zeiten vom Rudergänger auf einem Koppelboard vermerkt. Aus den Eintragungen hat dann der Kapitän oder Navigator die gefahrenen Schläge auf einer Karte eingezeichnet und auf diese Weise zwischen den Beobachtungen einen jeweiligen Koppelort (DR-Position) bestimmt. Dead Reckoning meint ins Deutsche übersetzt soviel wie totale Berechnung.
Die Pro-Version der App enthält ein Modul zur Aufzeichnung einer Versegelung. Die Berechnung von Distanz und Kurs über Grund „zu Fuß“ ist damit nicht nötig.
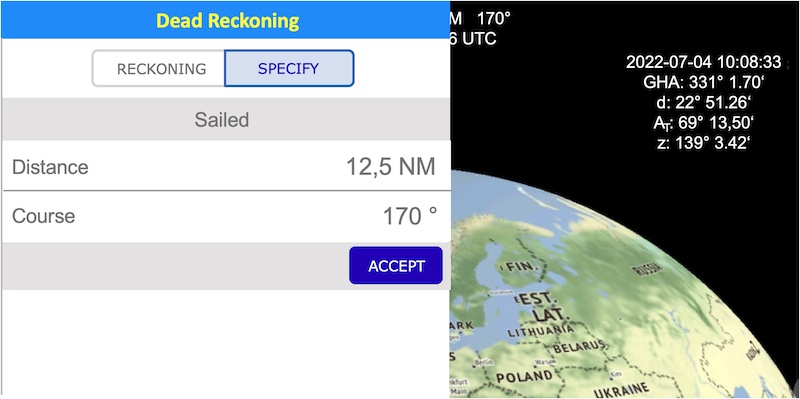
Nach Eingabe der geschätzten Versegelungsdaten von Distance = 12,5 NM und Course = 170° müssen diese mit ACCEPT bestätigt werden. Der daraufhin berechnete Standort wird auf dem Display links unten als Last position angezeigt. Er lautet:
39° 39.19’ N / 014° 26.02’ E
Weil nachfolgende zweite Beobachtungen noch den weiteren Tag hindurch möglich sind, werden diese immer als Last position ausgegeben. Dabei muss die Versegelung immer ab der ersten Beobachtung eingegeben werden. In der Pro-Version wird außerdem noch eine DR Position angegeben, die sich aus der letzten Position und den Daten des Dead Reckoning Moduls zusammensetzt.
Alternativ gibt es aber auch eine andere Möglichkeit. Nach dem Deaktivieren von Circle of Position 1 (COP 1) wird die Option zur Übernahme von noch eingetragenen Daten der letzten zweiten Beobachtung angeboten. Dieser Neustart mit einer beliebigen zweiten Beobachtung bietet den Vorteil, dass die Einschätzung einer versegelten Strecke einfacher wird, denn die jeweiligen Ortsveränderungen sind dann nicht mehr so groß.
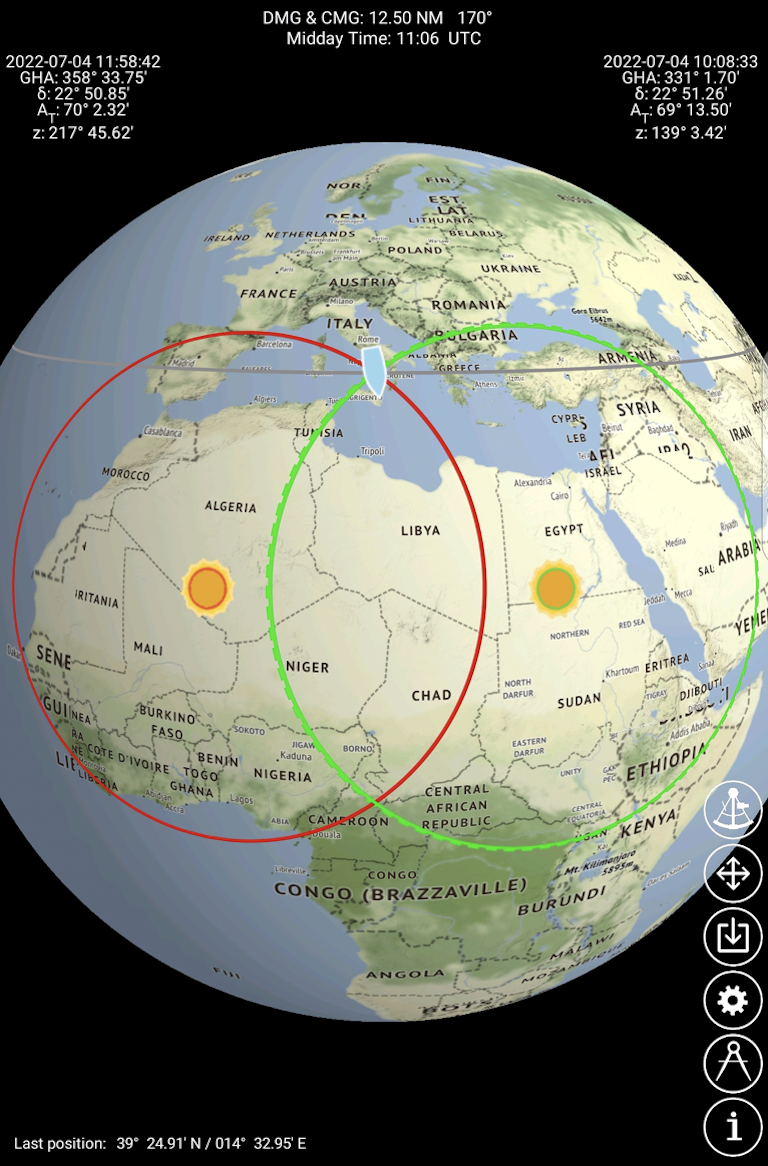
Oben links auf dem Display werden jetzt der Greenwichwinkel GHA mit 358° 40,54’, die Deklination δ mit 23° 2,89’ und die beobachtete Sonnenhöhe AT mit 70° 1,43’ angezeigt. Außerdem werden jetzt auch die Azimute z beider Beobachtungen berechnet und in den Blöcken oben rechts und links jeweils angegeben. Nach jeder zweiten Beobachtung wird überdies die Zeit des Schiffsmittags oben in der Mitte des Displays angeführt. Sämtliche Angaben dienen lediglich zu Informationszwecken und müssen vom Benutzer nicht weiter verwendet werden.
Auch in der Basic-Version kann die elektronische Karte gezoomt werden. Dadurch steigt jedoch nicht deren Auflösung. Kleine Inseln, wie z. B. die Vulkaninsel Stromboli, die im Bild 8 gerade angefahren wird, werden nicht angezeigt. Eine hohe Auflösung ermöglicht erst die Pro-Version. Für eine Notfallnavigation ist die Auflösung in der Basic-Version jedoch ausreichend.
Die gezoomte Grafik zeigt insgesamt vier Höhenkreise. Der grün gestrichelte ist der Höhenkreis aus der Höhe der ersten Beobachtung. Durch die Versegelung ändert sich der Radius dieses Höhenkreises. Er wird dann als grün durchgezeichneter Kreis dargestellt. Er schneidet sich mit dem Höhenkreis aus einer zweiten Beobachtung, der rot abgebildet ist. Der Schnittpunkt ist der Standort zum Zeitpunkt der jeweiligen zweiten bzw. letzten Beobachtung. Der graue Breitenkreis ist die neue Standortbreite und ersetzt die in den Settings ursprünglich eingetragene Breite, die auf diese Weise – wie bereits erwähnt – mitreist.

Damit nicht gleich beim ersten Mal die falsche Kreuzung der Höhenkreise berechnet wird, ist es wichtig, dass am Beginn einer Reise in den Settings die richtige Breite eingetragen wird. Eine Änderung der Eintragungen im Bereich Settings ist nur nach dem Deaktivieren einer zweiten Beobachtung möglich. Dabei werden keine Daten gelöscht.
Was ist allerdings, wenn man auf der anderen Seite der Erde, vielleicht sogar an der Datumsgrenze unterwegs ist? Auch das stellt kein Problem dar. Nachdem das Datum des folgenden Tages eingetragen worden ist, liegt die Tageszeit der zweiten Beobachtung zwar vor der Tageszeit der ersten Beobachtung, aber dennoch wird eine richtige Position berechnet.
Bis dahin
Astronavigation hat noch immer etwas Romantisches an sich. Auch wenn die vielen Displayausgaben und ausführlichen Grafiken gar nicht gebraucht werden, wurden sie trotzdem gemacht, um einen Unterschied zur Satellitennavigation deutlich hervorzuheben. Wer einmal einen Lehrgang über astronomische Navigation besucht hat, kann sich bestimmt noch an den einen oder anderen Begriff erinnern.
Wenn wirklich einmal jemand in die Verlegenheit kommen sollte, astronomisch navigieren zu müssen, hat er es mit dieser App sehr einfach. Die drei Eintragungen in den Settings können schon vor einer Reise vorgenommen werden und dürften auch sonst kein Problem darstellen. Wichtig ist dabei die Eintragung der Approximate latitude. Sonst kann es passieren, dass nicht der nördliche, sondern der alternativ mögliche südliche Standort berechnet wird. Im Stress versteht man nicht gleich, wie dies korrigiert werden kann, obwohl auch das ganz einfach ist.
Eine erste Beobachtung kann erfolgen, sobald die Sonne möglichst klar zu sehen ist und nicht mehr allzu tief am Himmel steht. Zur präzisen Feststellung der Beobachtungszeit sollte eine Stoppuhr benutzt werden. Das kann auch die in einem Handy sein. Diese wird zu einer vollen Minute der Weltzeit UTC gestartet. Gestoppt wird sie bei Feststellung der Sonnenhöhe, möglichst durch Zuruf an eine zweite Person. Die Startzeit der Stoppuhr und ihre Laufzeit sind dann zu addieren und ergeben die Beobachtungszeit.
Die Eintragung dieser Zeit und der Sex-tantenablesung unter Circle of Position 1 ist der ganze zu leistende Aufwand nach der ersten Beobachtung.
Die zweite Beobachtung ist dann genauso zu machen. Es sollten jedoch schon zwei Stunden dazwischenliegen, damit sich die Höhenkreise in einem einigermaßen großen Winkel schneiden. Die erzeugten Grafiken erlauben diesbezüglich eine gute Beurteilung. Eine Orientierung ist aber auch an der Differenz der Azimute möglich. Nach dem Aktivieren der zweiten Beobachtung und Eingabe der Versegelung wird der berechnete Standort sofort ausgegeben. Die Aktivierung einer zweiten Beobachtung liefert auch gleich den Schiffsmittag.
Die App ist faktisch selbsterklärend. Ihre Nutzung erfordert keinerlei Kenntnisse in Mathematik oder Astronomie. Eine häufig gestellte Frage in der Astronavigation gilt der Genauigkeit. Bis auf den Umstand, dass die Erde keine Kugel, sondern ein etwas abgeflachter Ellipsoid ist, rechnet die verwendete Mathematik von Gauß genau. Die Ellipsoidform verursacht dabei nur geringe Fehler. Die größten Fehler entstehen durch ungenaue Messungen von Höhe und Zeit. Selbst geübte Sextantenbenutzer bringen es auf einem nicht schwankenden Schiff nur auf Standortabweichungen, die größer als ein oder zwei Meilen sind.
Nicht zu unterschätzen sind Anwendungsfehler. Als auf der ganzen Welt noch mit dem Sextanten navigiert werden musste, wussten die Seeleute, dass Sonnenhöhen unter 15° und über 80° tabu sind. Außerdem sollten sich Standlinien zur Positionsbestimmung auf keinen Fall in Winkeln unter 30° kreuzen. Das gilt in Teilen auch noch in der postmodernen Astronavigation. Die Höhenbegrenzung von 80° ist zwar entfallen, aber die Untergrenze muss auch hier eingehalten werden, denn sie wird von Eigenschaften der Erdatmosphäre gesetzt. Bei den Schnittwinkeln kann man auch etwas weniger zulassen, weil keine Standlinien mehr gezeichnet werden müssen. Wie weit man dabei gehen kann, ist allerdings sehr abhängig von der Genauigkeit der Höhenmessungen.
In der Basic-Version der App werden die Sonnenephemeriden mithilfe eines kleinen Moduls direkt berechnet. Diese gewählte Berechnungsart ist nicht ganz so genau wie in der Pro-Version. Dort wird nicht gerechnet, sondern die Ephemeriden werden von einer Datenbank bereitgestellt.
Die Berechnungen von Greenwichwinkel und Deklination sind gar nicht so kompliziert, wie man vielleicht denken könnte. Im Beitrag Navigieren mit Excel wird gezeigt, wie die in der Basis Version angewandte Berechnung mit Excel realisiert wird. Excel-Liebhaber können damit leicht ausrechnen, wo auf der Erde die Sonne in einer angegebenen Sekunde des 21. Jahrhundert gerade im Zenit steht.
Infolge der Direktberechnung treten Standortabweichungen von im Mittel 0,3 NM auf. Diese können zeitweise auch bis zu 0,5 NM groß sein. Da sich ein Gesamtfehler geometrisch aus Einzelfehlern zusammensetzt, spielt das in der Gesamtbewertung jedoch kaum eine Rolle. Wir versuchen, dies einmal nachzuempfinden.
Wenn fehlerhafte Messungen eine Standortabweichung von beispielsweise 2 NM verursachen und die Mathematik mit fehlerbehafteten Ephemeriden bis zu 0,5 NM falsch ist, dann sind diese beiden Fehler nach dem Fehlerfortpflanzungsgesetz als Katheten eines rechtwinkligen Dreiecks zu betrachten – und der Gesamtfehler ist die Hypotenuse des Dreiecks. Daraus resultiert nach Pythagoras das Folgende:
Fehlerfortpflanzung:
![\[\text{Gesamtfehler}=\sqrt{\text{Messfehler}^2+\text{Rechenfehler}^2}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-ef314338e997a8820f651355abffeee2_l3.png "Rendered by QuickLaTeX.com")
![\[F_{Ges}=\sqrt{2^2+0,5^2}\text\;{NM}=\underline{\underline{2,06\,NM}}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-a8b0c3405860a24185ed02197d5ddc83_l3.png "Rendered by QuickLaTeX.com")
Eine durch Messabweichungen bedingte Standortabweichung von zwei nautischen Meilen kann durch eine mathematisch bedingte Fehlberechnung von 0,5 nautischen Meilen nur um 0,06 nautische Meilen verschlechtert werden. Das sind weniger als 5%.
Sun Navigation Pro
Die Professional-Version unterscheidet sich von der Basic-Version durch die eingangs genannten zehn zusätzlichen Funktionen, die im Folgenden erläutert werden.
Zweitsystem für beliebige Eingaben
Hierbei handelt es sich um ein völlig unabhängiges zweites Navigationssystem, das auch parallel zu einer gerade aktiven Navigation betrieben werden kann. Es arbeitet mit eigenen Grundeinstellungen, die im Menü Settings zu vergeben sind.
In der Schalterstellung TEST MODE = EIN werden die Grundeinstellungen für das Zweitsystem eingetragen. Steht dieser Schalter auf AUS, dann gelten alle Eintragungen für das Default-Navigationssystem. Zur Kennzeichnung des Zweitsystems steht am unteren Displayrand in gelber Schrift TEST MODE.
Für die Simulation von Versegelungen ist im TEST MODE nur die Funktion Specify verfügbar, d. h. für eine Versegelung sind Kurs und Distanz einer Ortsveränderung zwischen den Beobachtungen vorzugeben.
In diesem Zweitsystem können beliebige Angaben für Datum, Uhrzeit und Höhe gemacht werden. Der Benutzer bekommt die Ergebnisse seiner Eingaben in Grafiken und errechneten Zahlen auf dem Display unmittelbar präsentiert. So können ohne jeglichen Aufwand in Abhängigkeit von Jahreszeiten und Seegebieten die verschiedensten Szenarien simuliert, dargestellt und untersucht werden. Das Zweitsystem stellt darüber hinaus ein ideales Tool dar, um die Navigation mit der Sonne und das Wesen der Astronavigation überhaupt auf plastische Art zuverstehen zu lernen.
So ist es leicht nachvollziehbar, dass große Fehler entstehen können, wenn die Zeiten zwischen den Beobachtungen zu kurz sind, bzw. wie navigiert werden sollte, um mit möglichst geringen Zwischenzeiten brauchbare Ergebnisse zu erhalten. Beispielsweise kann auch gezeigt werden, dass die Mittagsbreite beim Segeln nahe der Deklinationsbreite sehr gute Dienste leisten kann.
Der TEST MODE kann auch dafür eingesetzt, eine gerade laufende aktive Navigation zu optimieren. So lässt sich mit einer kopierten ersten Beobachtung leicht herausfinden, ob als zweite Beobachtung vielleicht eine Mittagsbreite günstiger wäre oder zu welcher Zeit eine zweite Beobachtung einen optimalen Kreuzungswinkel verspricht. Der TEST MODE akzeptiert zwar beliebige Eingaben, berechnet jedoch nur dann einen Standort, wenn die Eingaben dies auch zulassen.
Nutzung der Mittagsbreite
Die Mittagsbreite ist der wohl am häufigsten gemessene Positionskreis in der Geschichte der Seefahrt. Schon Kolumbus benutzte die Mittagsbreite, um nach Europa zurückfinden zu können. In der Pro-Version erlaubt auch die App die Nutzung der Mittagsbreite. Ihre Funktion wird aktiviert, indem im Menü Observation die Zeile Circle of Position 1 (oder 2) angetippt wird. Dadurch öffnet sich ein Auswahlfenster, in dem dann die Mittagsbreitenfunktion Noon latitude angewählt wird, wie das Bild 9 zeigt.

Die Messung der Mittagsbreite muss nicht sekundengenau erfolgen, denn die Sonne verharrt während ihrer Kulmination scheinbar minutenlang in derselben Höhe. Wichtig ist nur, die Zeit der Kulmination ungefähr zu kennen, um sich zu einer Messung nicht allzu lange einer Sonnenbestrahlung aussetzen zu müssen. Die Zeit des Schiffsmittags wird nach zwei aufeinanderfolgenden Höhenmessungen oben in der Mitte des Displays angezeigt. Beide Beobachtungen müssen deshalb während des Vormittags gemacht werden. Die angegebene Zeit des Schiffsmittags wird genau genug sein, wenn die Zwischenzeit wenigstens eine Stunde beträgt.
Kurz vor der angegebenen Mittagszeit wird damit begonnen, den Kulminationszeitpunkt der Sonne zu finden, indem ihre Höhe etwa alle zwei Minuten gemessen wird, bis ein Sinken feststellbar ist. Die größte der dabei gemessenen Höhen ist der Sextantenwinkel der Kulminationshöhe. Die wird dann unter Sextant reading eingetragen.
Dabei ist es wichtig anzugeben, ob die Sonne während ihrer Kulmination nördlich oder südlich beobachtet wurde. Bei einer sehr hoch stehenden Sonne ist es möglich, dass Höhen von mehr als 90° festgestellt werden. Dann wurde die Sonne in der falschen Himmelsrichtung beobachtet. Ein dabei gefahrener West- oder Ostkurs kann schon etwas hilfreich sein, um die richtige Peilung zu beachten. Man kann auch den über 90° hinausgehenden Betrag von 90° wieder abziehen. Misst man also 95°, dann ist die Höhe in Wirklichkeit 85°.
Wenn in Breiten gesegelt wird, die sich nur wenig von der Deklinationsbreite unterscheiden, dann kann eine Verwendung der Mittagsbreite sehr von Vorteil sein. Wenn die zweite Beobachtung eine Mittagsbreite war, kann diese für zukünftige Messungen als erste Beobachtung übernommen werden. Dazu ist im Block Circle of Position 1 der Schalter Active zu betätigen. Daraufhin öffnet sich ein Auswahlfenster, ähnlich wie im Bild 9 zu sehen ist. Darin kann zwischen einem Neustart oder der Übernahme der Daten von Circle of Position 2 gewählt werden. Das Dead-Reckoning-Modul startet nach einer solchen Übernahme ebenfalls von vorne, löscht also alle bisher gespeicherten Daten.
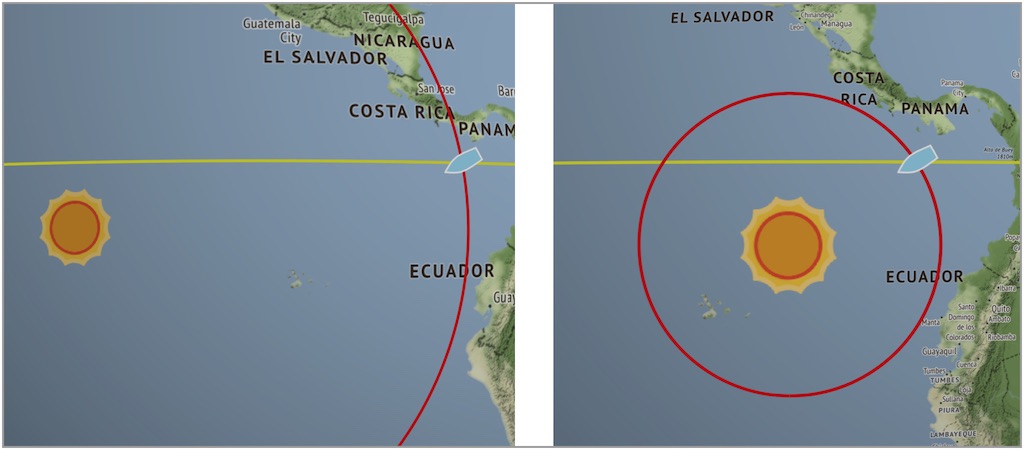
Bild 10 zeigt eine Nachmittags-Navigation in Nähe der Deklinationsbreite mithilfe einer vorher beobachteten Mittagsbreite. Man erhält damit im gesamten restlichen Tagesverlauf immer gute Kreuzungswinkel und damit genaue Standortergebnisse.
Bei Nutzung der Mittagsbreite im TEST MODE ist es möglich, dass Kulminationszeiten eingegeben werden, die in der Praxis nicht vorkommen können. Dies führt zu nicht ganz richtigen Standortergebnissen, weil der Mittagsbreitenkreis auf Basis der beobachteten Höhe und der Deklination berechnet wird. Weil hier aber alle Zeiteingaben zugelassen sind, könnten die daraus berechnete Deklination und damit der berechnete Standort falsch sein.
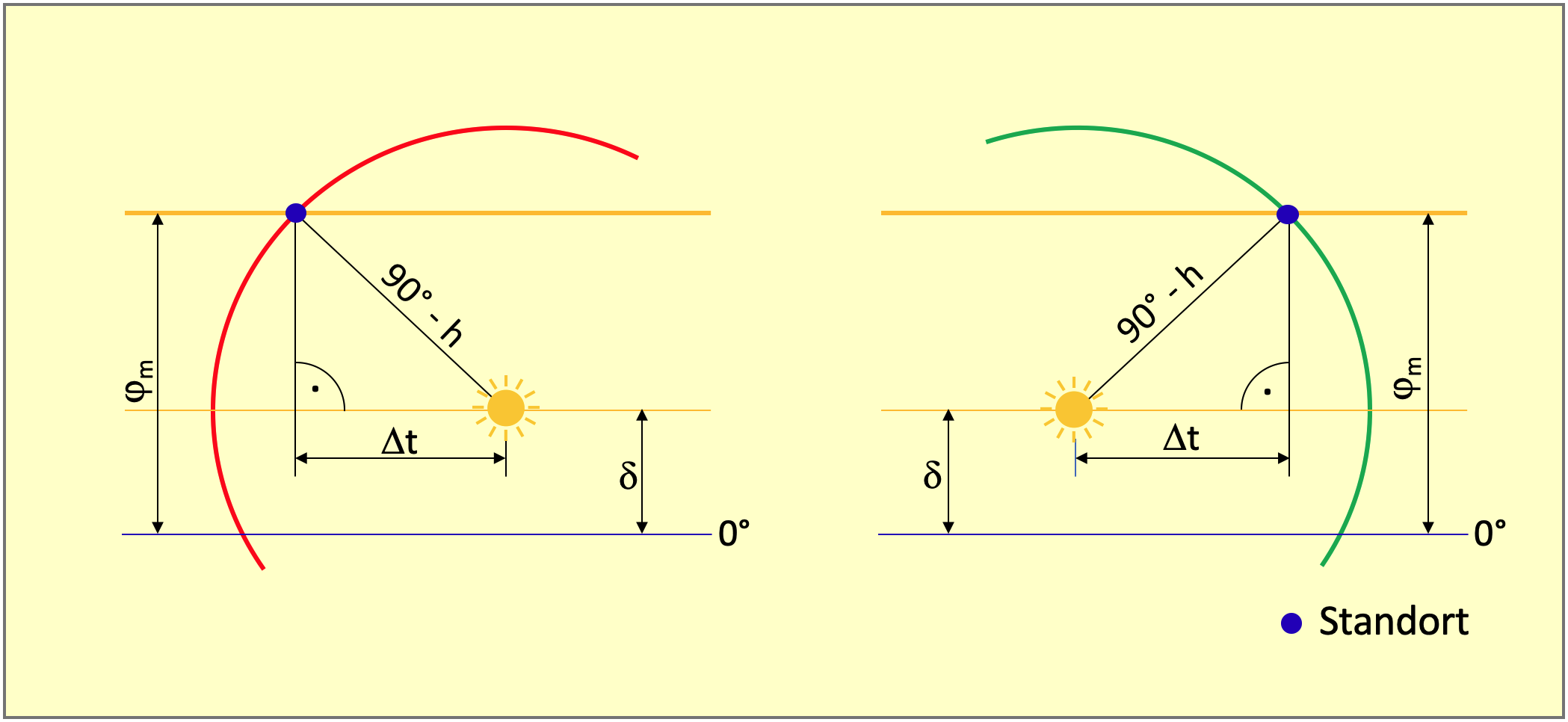
Die App führt deshalb eine Plausibilitätsprüfung durch, die mit der Grafik im Bild 11 erklärt wird. Eine Kulmination findet statt, wenn sich Standort und Bildpunkt der Sonne auf demselben Meridian befinden. In diesem Fall ist die in den Grafiken übertrieben groß dargestellte Zeit Δt = 0. Außerdem ist dann der Zenitabstand 90° – h gleich der Differenz  m – δ.
m – δ.
 m – δ darf die Kathete Δt nicht länger als 10 Minuten sein.
m – δ darf die Kathete Δt nicht länger als 10 Minuten sein.In einem rechtwinkligen sphärischen Dreieck ist der Kosinus der dem rechten Winkel gegenüberliegenden Seite gleich dem Produkt der Kosinusse der anderen beiden Seiten. Damit entspricht der Quotient der Kosinusse der Seiten (90° – h) und (m – δ) dem Kosinus des Bogenmaßes der Seite Δt. Wird dafür ein Winkel von 2,5° zugelassen, dann erhält man für Δt genau 10 Minuten (15° = 1 h).
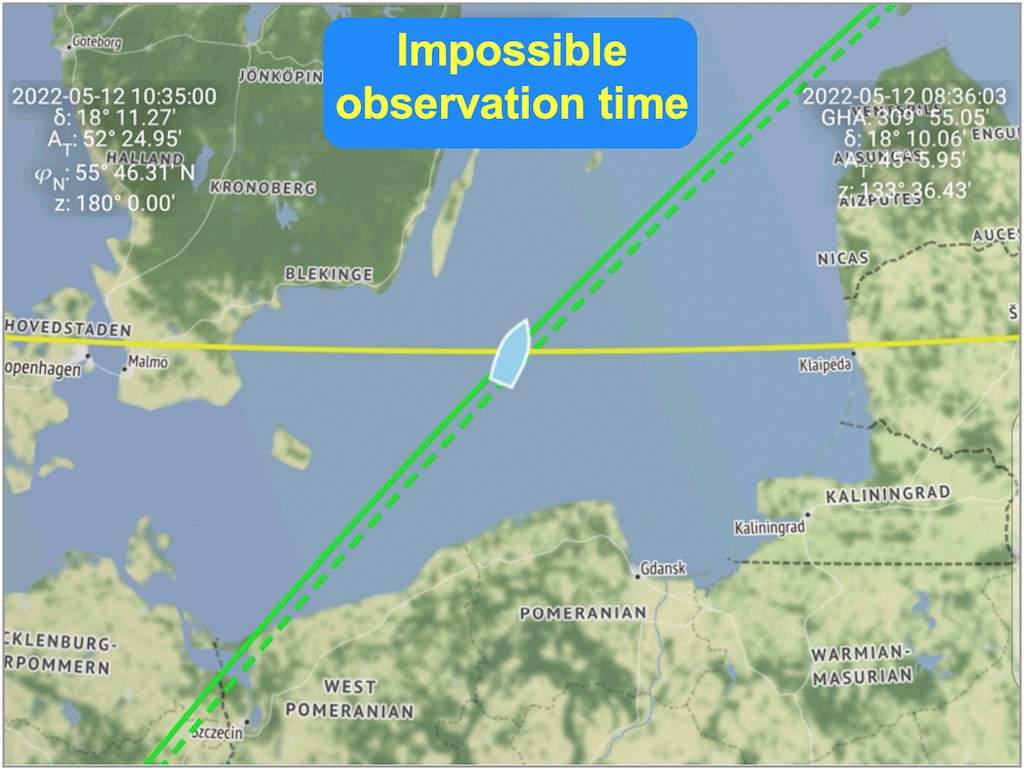
Die App prüft damit ab, ob alle Daten in dieses Zeitfenster von Δt = 10 Minuten passen, in dem die Kulmination nur möglich gewesen sein kann. Werden darüber hinaus gehende Beobachtungszeiten eingegeben, dann würde dafür eine nicht passende Deklination aufgerufen werden. Das führt dann zu der Warnausschrift Impossible observation time in gelber Schrift, wie es im nebenstehenden Bild 12 dargestellt ist.
Im normalen Navigationsmodus sollte das nicht passieren, weil die wahre Zeit der Mittagsbreiten-Beobachtung bekannt ist und normalerweise auch so wie abgelesen eingegeben wird. Standortfehler infolge falsch berechneter Deklination aufgrund grob falscher Zeitangaben sind somit kaum möglich.
Download hochauflösender Karten
Das Herunterladen hochauflösender Karten funktioniert am besten in einem schnellen WLAN-Netz ohne Volumenbegrenzung. Nach dem Download sind die Karten offline verfügbar. Offline verfügbar sind auch alle Gebiete, die vorher online in hoher Auflösung betrachtet wurden. Diese Gebiete können jedoch nicht mit einem Rahmen umgeben werden. Das geht nur bei den mit DOWNLOAD MAP heruntergeladenen Karten.
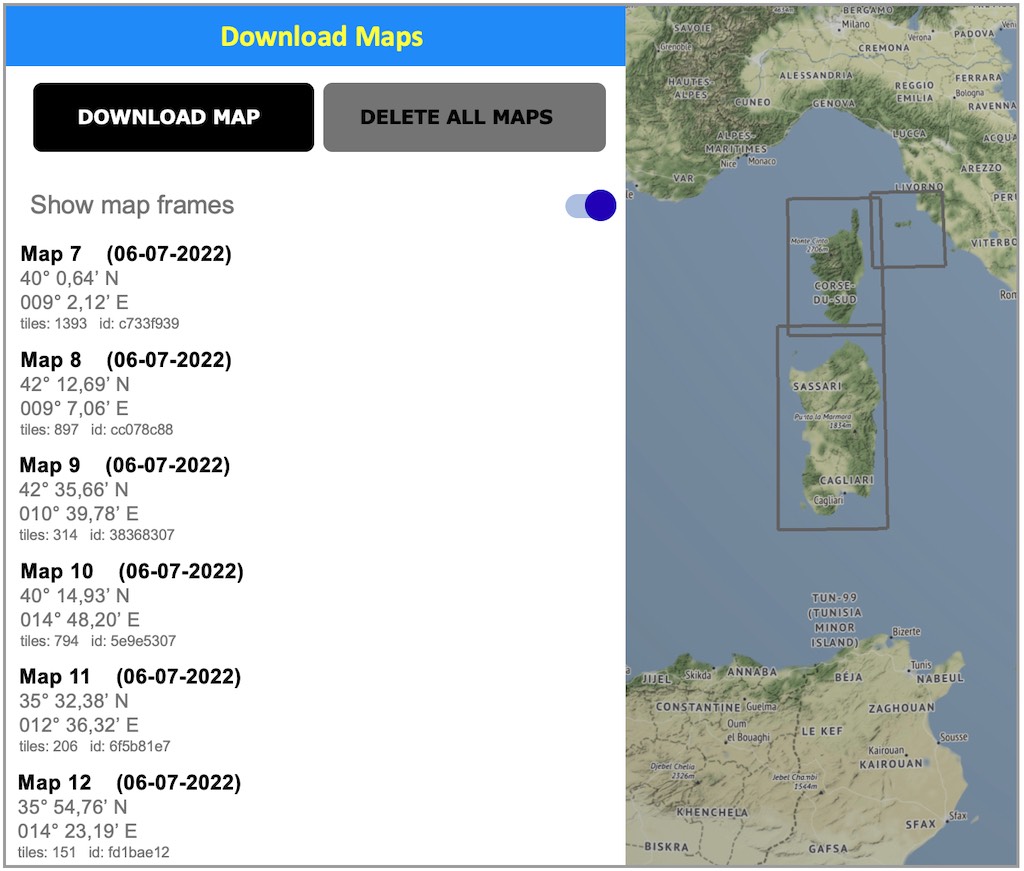
Die Rahmen haben den Vorteil, dass mit ihnen auf kleinere Inseln hingewiesen werden kann, die bei einer gröberen Zoomstärke leicht übersehen werden könnten. Das Herunterladen gestaltet sich denkbar einfach. Nach dem Antippen des entsprechenden Icons öffnet sich das Download-Menü mit den Schaltflächen DOWNLOAD MAP und DELETE ALL MAPS. Darunter befindet sich ein Schalter zum Ein- und Ausschalten von Kartenrahmen. Die bereits heruntergeladenen Karten sind fortlaufend nummeriert.
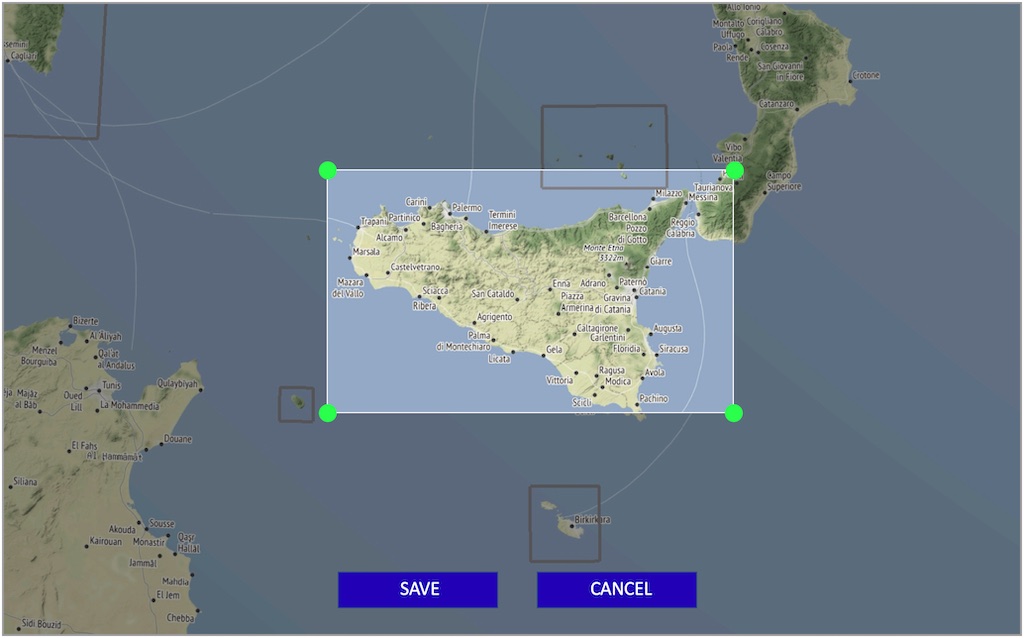
Zum Herunterladen einer weiteren Karte wird zunächst das beabsichtigte Segelgebiet ins Display geschoben. Nach Antippen der Schaltfläche DOWNLOAD MAP erscheint in der Displaymitte ein Fenster mit vier grünen Anfassern auf einer sonst abgedunkelten Karte. Mit diesen Anfassern, der Schiebe- und Zoomfunktion kann jetzt das herunterzuladende Gebiet eingerahmt und mit SAVE geladen werden.
Die Bilder 13 und 14 veranschaulichen das Vorgehen.Tippt man auf eine der im Bild 13 gezeigten Zeile einer geladenen Karte, dann wird sie ins Zentrum des Displays gebracht. Durch das Antippen des Download-Icons unten auf dem Display verschwindet die Leiste mit der Kartenliste wieder. Die Karten können auch einzeln gelöscht werden. Dazu wird die entsprechende Kartezeile nach links geschoben, woraufhin rechts das rote „Delete“-Feld zum Bestätigen erscheint.
Bild 15 soll demonstrieren, wie weit in das heruntergeladene Kartenmaterial hineingezoomt werden kann. Ein Küstenverlauf kann dadurch präzise angezeigt und eine bestimmte Bucht oder Marina schon von weitem angesteuert werden. Das Bild entstammt der neuesten Version der App. In dieser wurde die Zoomtiefe etwas verringert, damit der Download von Karten in wesentlich kürzerer Zeit erfolgen kann.

Die Bilder 13 und 14 veranschaulichen das Vorgehen.Tippt man auf eine der im Bild 13 gezeigten Zeile einer geladenen Karte, dann wird sie ins Zentrum des Displays gebracht. Durch das Antippen des Download-Icons unten auf dem Display verschwindet die Leiste mit der Kartenliste wieder. Die Karten können auch einzeln gelöscht werden. Dazu wird die entsprechende Kartezeile nach links geschoben, woraufhin rechts das rote „Delete“-Feld zum Bestätigen erscheint.
Bild 15 soll demonstrieren, wie weit in das heruntergeladene Kartenmaterial hineingezoomt werden kann. Ein Küstenverlauf kann dadurch präzise angezeigt und eine bestimmte Bucht oder Marina schon von weitem angesteuert werden. Das Bild entstammt der neuesten Version der App. In dieser wurde die Zoomtiefe etwas verringert, damit der Download von Karten in wesentlich kürzerer Zeit erfolgen kann.
Dead Reckoning Modul
Weil einzig die Sonne als Navigationsgestirn benutzt wird und für eine Standortberechnung zwei zeitlich auseinanderliegende Beobachtungen der Sonne notwendig sind, müssen die in der verstrichenen Zeit zurückgelegte Distanz und der dabei gefahrene mittlere Kurs berechnet werden. Im deutschsprachigen Gebiet wird dieser Vorgang als Koppelnavigation oder einfach als Koppeln bezeichnet. Im Englischen nennt man dies Dead Reckoning – oder abgekürzt DR (DR-latitude, DR-position etc.). Für eine Koppelnavigation werden laufend nur die Basisparameter einer Bewegung erfasst: die Richtung mit einem Kompass, die Geschwindigkeit mit einer Logge und die Zeit mit einer Uhr. Außerdem sind die Einflüsse von Wind und Strömung zu berücksichtigen. Seit dem 15. Jahrhundert gilt diese Navigationsart als eine wichtige Methode zur Orientierung auf See. Sie wurde in früheren Zeiten allerdings grafisch ausgeführt, denn analytisch wäre dies zu anspruchsvoll geworden. Der Fehler einer sorgfältig ausgeführten Koppelnavigation muss nicht größer als 5% sein.
Die zur Standortberechnung erforderliche Angabe einer Ortsveränderung kann in der App nach zwei Methoden erfolgen. Bei der Methode Specify wird die zurückgelegte Distanz auf einem gefahrenen Kurs einfach nur angegeben. Auch im TEST MODE kann nur diese Methode verwendet werden.

Wird die Methode Reckoning genutzt, dann müssen die Fahrt durchs Wasser und der gefahrene Kurs unter Berücksichtigung des Windversatzes angegeben werden. Bei vorhandener Meeresströmung können zusätzlich Richtung und Geschwindigkeit der Strömung vorgegeben werden. Meeresströmungen liefert ein Strömungsradar, wozu man allerdings online sein muss. Falls es erforderlich sein sollte, kann ein Freund in der Heimat über ein Satellitentelefon um Auskunft gebeten werden.
Die App erzeugt aus den Angaben ein sogenanntes Koppelboard, das im Bild 16 auf der unteren Hälfte links angezeigt ist. Darin sind für jeden Schlag, Geschwindigkeit durch Wasser, gefahrener Kurs, Zeitdauer des Schlages und zurückgelegte Distanz unter Berücksichtigung einer angegebenen Meeresströmung aufgeführt. Ein neuer Schlag wird angelegt, sobald sich Werte entweder über die gefahrene Geschwindigkeit bzw. den gefahrenen Kurs oder beide geändert haben. Das geschieht nach Wenden, Halsen, Kurskorrekturen oder nachhaltigen Geschwindigkeitsänderungen.

Die App muss also nach jedem Segelmanöver „gefüttert“ werden. Strömungsänderungen bewirken keine neue Zeile in der Koppeltafel. Sie werden immer dann in den aktuellen Schlag mit eingerechnet, solange ihre Größen sichtbar in den entsprechenden Feldern eingetragen stehen.Nach jeder Aktivierung einer zweiten Beobachtung greift die App auf die aktuellen Daten des Reckoning-Moduls zu und berechnet den Standort unter Berücksichtigung der Versegelung. Dieser Standort wird unten links im Display als Last position angegeben. Da die Koppelnavigation aber weiterläuft, wird der Koppelort als DR Position angeführt.
Die Ergebnisse der Reckoning-Funktion werden auch grafisch auf der Karte als Track in blauer Farbe angezeigt, so wie es im Bild 17 gezeigt ist. Nach jeder neuen Standortberechnung wird dieser Track als gestrichelte Linie weitergeführt. Außerdem werden oben in der Mitte des Displays ständig die Daten von DMG, CMG und VMG (Velocity Made Good) angezeigt, also zurückgelegte Distanz über Grund, Kurs über Grund und Geschwindigkeit über Grund. Wenden, Halsen, Kurs- und Geschwindigkeitsänderungen sowie Strömungen sind dabei entsprechend der gemachten Eingaben berücksichtigt.
Wenn Specify gewählt wurde, fragt die App nach jeder Aktivierung einer Zweitbeobachtung nach den Daten von DMG und CMG. Hierbei sind die Daten jeweils vom Zeitpunkt der ersten Beobachtung anzugeben. Das Dead Reckoning ist in diesem Fall manuell auszuführen. Alternativ kann jede zweite Beobachtung als erste Beobachtung übernommen werden und dann sind nur immer die Ortsveränderungen in der zwischen den Beobachtungen verstrichenen Zeit anzugeben.
Sun Almanach
Für eine klassische Standortberechnung nach dem Zweihöhenverfahren von Saint Hilaire brauchte man immer ein nautisches Jahrbuch, aus dem die Positionsdaten der Sonne, Greenwichwinkel und Deklination, für eine gegebene Beobachtungszeit entnommen werden konnten.
Das war stets eine aufwendige Prozedur. Der Tagesseite in einem nautischen Jahrbuch entnahm man den Winkel der vollen angefangenen Stunde. Für die Minuten und Sekunden gab es am Buchende die Seiten mit den Schalttafeln, mit deren Hilfe dann ein Zuwachs berechnet wurde und anschließend musste beides addiert werden. Das wird genauso heute noch in den Astronavigations-Lehrgängen der Segelschulen gelehrt.
Die Berechnung dieser Daten, die sogenannten Ephemeriden der Sonne, ist eigentlich ganz einfach, wenn dazu das Keplersche Zweimassensystem benutzt wird. Diese Berechnung erledigt heutzutage jedes Smartphone in Millisekunden. Obwohl die Werte im Mittel nur eine Genauigkeit von 0,5’ aufweisen, sind berechnete Standortabweichungen damit vielleicht nur um 0,3 Seemeilen schlechter, als mit Ephemeriden, die auf 0,1’ berechnet sind. Das liegt daran, dass die unvermeidbaren Fehler in der Messung von Kimmabstand und Zeit viel größer sind und Rechenfehler dadurch reduzierte Auswirkungen haben. In der Basisversion findet die Ephemeridenberechnung direkt im Mobilgerät statt.
Genauere Ergebnisse erhält man unter Berücksichtigung der Massen des Mondes und der großen Planeten. Mond und Erde bilden ein Massensystem mit einem Massenschwerpunkt, der zwar im Erdinnern, aber nicht mehr im Erdmittelpunkt liegt. So muss man sehen, dass nicht der Erdmittelpunkt, sondern dieser Massenschwerpunkt die Sonne umkreist. Der Mond umkreist die Erde einmal in 29,5 Tagen, wodurch der Erdmittelpunkt – aus Sicht der Sonne – auf seiner Umlaufbahn mal schneller und mal langsamer unterwegs zu sein scheint, was dann zu den Abweichungen führt.
Die Positionen des Bildpunktes der Sonne, die Sonnenephemeriden, werden also von der Mondposition beeinflusst. Eine weitere Abhängigkeit besteht durch die Massenanziehung der großen Planeten. Das alles kann von einem Handychip nicht mehr so einfach berechnet werden. Die Ephemeriden in der Professional Version sind deshalb extern berechnet worden und werden von der App in einer Datenbank gehalten. Diese Datenbank enthält die vorausberechneten Daten für den Greenwichwinkel und die Deklination des SonnenBildpunktes mit einer Genauigkeit von 0,1’ bis zum 31. Dezember 2040.
Beobachtung über mehrere Tage
Die maximale Zeitdauer zwischen einer ersten und der letzten zweiten Beobachtung wurde für einen Tag auf zwölf Stunden begrenzt. Nach sehr kurzen und sehr langen Zwischenzeiten schneiden sich die Höhenkreise nur noch in sehr spitzen Winkeln, wodurch Ungenauigkeiten in der Höhen- und Zeitmessung zu größeren Fehlern führen. In einer folgenden Nacht kann dann sowieso kein Standort mehr ermittelt werden. Erst am Folgetag wären wieder Beobachtungen möglich, bei denen sich die Höhenkreise in stumpfen Winkeln schneiden. Allerdings könnte dann das Reckoning-Ergebnis einen etwas größeren Standortfehler verursachen. Das bedeutet kurzgefasst, dass man es möglichst vermeiden sollte, zwischen der ersten und der letzten zweiten Beobachtung Tage zuzulassen.
Auch wenn es sehr unwahrscheinlich ist, könnte das Wetter dazu zwingen. Deshalb bietet die Pro-Version die Möglichkeit, über maximal drei Tage zusammenhängende Beobachtungen machen zu können.
Beobachtung der Sonne am Oberrand
Normalerweise wird im Fernrohr des Sextanten die Sonne mit ihrem Unterrand auf den Horizont gesetzt. Es kann allerdings vorkommen, dass Wolken den Unterrand der Sonne schon verdeckt haben und sich weiter verstärken, sodass nur noch schnell eine Beobachtung der Sonne an ihrem Oberrand möglich ist. Zu diesem Zweck muss die eventuell vorhandene letzte zweite Beobachtung deaktiviert und in den Settings eine Umschaltung von Sun at auf O vorgenommen werden. Da von dieser Umschaltung auch alle folgenden Beobachtungen betroffen wären, sollte nicht vergessen werden, die gewohnte Beobachtungsweise wieder einzurichten.
Anzeige der DR Position
Bei Nutzung der Reckoning-Funktion wird ab der ersten Beobachtung ständig eine Koppelposition berechnet. Diese Berechnung wird beendet, wenn nach dem Deaktivieren von COP 1 ein Neustart initiiert wird oder eine Übernahme der Daten aus einer zweiten Beobachtung erfolgt. Nach einer Standortberechnung, die unter Berücksichtigung der versegelten Strecke erfolgte, wird die Position des Schiffes als DR-Position aus den eingegebenen Daten weiter hochgerechnet. Dies ist mit der Positionsangabe bei einer Autofahrt durch einen langen Tunnel vergleichbar, bei der die Position nicht mehr anhand von Satellitensignalen, sondern aus der Radabrollung ermittelt wird.
Großkreisberechnung von Distanz und Kurs zu einem Ziel
Mitunter möchte man wissen, wie weit es vom eigenen Standort zu einem Ziel ist. Diese Funktion ist über das Icon mit dem Zirkelsymbol aufrufbar. Berechnet wird die kürzeste Entfernung auf einer Kugeloberfläche. Auch wenn man ein weit entferntes Ziel auf gleicher Breite ansteuern will, ist der Weg entlang demselben Breitengrad nicht der kürzeste Weg – es sei denn, man befindet sich auf dem Äquator. Der kürzeste Weg ist stets die Peilrichtung oder anders ausgedrückt die Orthodrome.

Wieso kann man eigentlich keinen Breitengrad entlangpeilen? Man muss sich einmal vorstellen, auf einem Breitengrad zu sein, der sich nur wenige Meter vom Nordpol entfernt befindet. Der Versuch, diesen Breitenkreis entlangpeilen zu wollen, misslingt, denn es ist ein Kreis, der vor einem liegt. Man kann von einem Punkt zu einem zweiten Punkt auf demselben oder anderen Breitenkreis nur die Luftlinie entlangpeilen und das ist dann die Orthodrome, die immer auch der sphärischen Krümmung der Erdoberfläche folgt und somit die kürzeste Verbindung auf einer Kugeloberfläche ist.
Aus dieser Erkenntnis heraus muss die Distanz zwischen zwei Positionen auf der Erdoberfläche mithilfe der sphärischen Trigonometrie berechnet werden. Um diese Strecke dann optimal zurücklegen zu können, muss auch ein sogenannter Anfangskurs berechnet werden. Dieser sollte dann gerade bei sehr langen Fahrten von Zeit zu Zeit erneut berechnet werden. Bild 18 zeigt in einem Beispiel eine Entfernungsmessung vom eigenen Standort nach Bermuda, wobei die Insel und der eigene Standort auf demselben Breitengrad liegen. Als Anfangskurs wurden nicht 90°, sondern 86° berechnet.
Die Großkreisrechnung ist immer erst nach einer zweiten Beobachtung – also von einem festgestellten Standort aus – verfügbar.
Übrigens
Die hier vorgestellte App ist natürlich auch im App Store als iOS-Version verfügbar, dort allerdings nur in einer Professional Version. Bedienung und Funktionalität sind mit der Android Version identisch.
Wer die App als Notfallsystem verwenden will, sollte daran denken, außer einem Sextanten auch einen Solarlader an Bord zu haben. Ein Stromausfall an Bord infolge einer defekten Akkuzelle ist mir selbst schon passiert. Danach funktioniert nichts mehr. Wenn dann noch viele Tage auf See verbracht werden müssen, bis man die nächste Küste erreicht, ist der Handy-Akku längst leer.
Appropos Smartphones, die können einen Standort doch auch anzeigen! Ja, das stimmt, aber ohne zusätzliche Papierseekarte, auf der man den angezeigten Standort lokalisieren und einzeichnen könnte, ist man allein mit nur diesen Zahlen ziemlich hilflos. Google Maps ist nämlich nur in Küstennähe verfügbar. Da sind die Apps „Sun Navigation“ und „Circle of Position Navigation“ dann doch die besseren Helfer in der Not, selbst dann, wenn dazu noch ein Sextant nötig ist. Ein Sextant an Bord schafft in jedem Fall zusätzliche Sicherheit, und das auch bei der Küstennavigation.
Für alle, die gern mit dem Sextanten navigieren, wäre es auch schön, ein Astro-Modul im Kartenplotter zu haben. Das wäre ganz einfach zu erstellen. Die nachfolgenden Kapitel in diesem Buch enthalten alle dazu erforderlichen mathematischen Grundlagen. Doch darüber sollte sich die Industrie Gedanken machen.