(Hier der Link zur Gauß’schen Lösung des Zweihöhenproblems)
Der Portugiese Pedro Nunes (1502 – 1578) beschrieb ein Prinzip, wonach die geografische Breite aus zwei unterschiedlichen Höhen der Sonne bestimmt werden kann. Von dem dänischen Astronom Tycho Brahe (1546 – 1601) ist bekannt, dass er die unbekannte Position eines Sterns auf der Himmelskugel aus der bekannten Position zweier anderer Sterne ableitete. Diese Aufgabe unterscheided sich nicht von der Bestimmung der unbekannten Position eines Schiffes, denn die Position des Zenits über einem Schiff auf der Himmelskugel ist identisch mit der Position des unbekannten Sterns, auch wenn sich dort im Zenit gerade kein Stern befindet. Das Gradnetz auf der Erde ist dasselbe, wie das auf der Himmelskugel.
Es dauerte allerdings sehr lange, bis man diese Erkenntnisse umsetzen konnte. Eine Initialzündung gab ein Preisausschreiben der Pariser Akademie der Wissenschaften 1727. Doch keine der eingehenden Lösungen konnte sich in der Seefahrt etablieren. Noch im selben Jahrhundert führte die Systematisierung der Formeln der sphärischen Trigonometrie durch Leonhard Euler zu einem wissenschaftlich anerkannten Rechenweg, mit dem ein Schiffsstandort aus den Höhen zweier Himmelskörper über dem Horizont mit höchster Präzision und direkt berechnet werden konnte. Doch der Rechenaufwand war für eine Anwendung auf See viel zu groß, denn als Rechenhilfen gab es nur Logarithmen und so ist diese Methode nie verwendet worden. Sie ist das Thema im folgenden Beitrag.
Die nachstehend vorgestellte Berechnung ist in der moderneren nautischen Literatur als Methode einer „Standortbestimmung direkt aus den Höhengleichen“ bekannt. Leider sind die dazu gezeigten Berechnungen meist in einer ziemlich unübersichtlichen Weise präsentiert worden. Manchmal wird in diesem Zusammenhang sogar Carl Friedrich Gauß als Spiritus Rector dieser Methode genannt, obwohl Gauß nun überhaupt nichts mit dieser Lösung des Zweihöhenproblems zu tun hatte. Sie wurde in den Jahren 1778 bis 1790 mehrfach von verschiedenen Autoren beschrieben. Eine gute Beschreibung machte der Niederländer Peter Nieuwland, die später von Franz Xaver von Zach in der „Sammlung astronomischer Nachrichten, Berlin 1793“ als Mitteilung in Deutsch vorgestellt wurde. Herr von Zach war ein begeisterter Astronom und besaß in Gotha ein eigenes Observatorium. Er stand im regen Briefwechsel mit seinem Freund Carl Friedrich Gauß, dem er einen Sextanten für Vermessungsaufgaben an Land überließ. Genau dieses Instrument war später ein Motiv auf dem 10 DM Schein der deutschen Bundesbank.
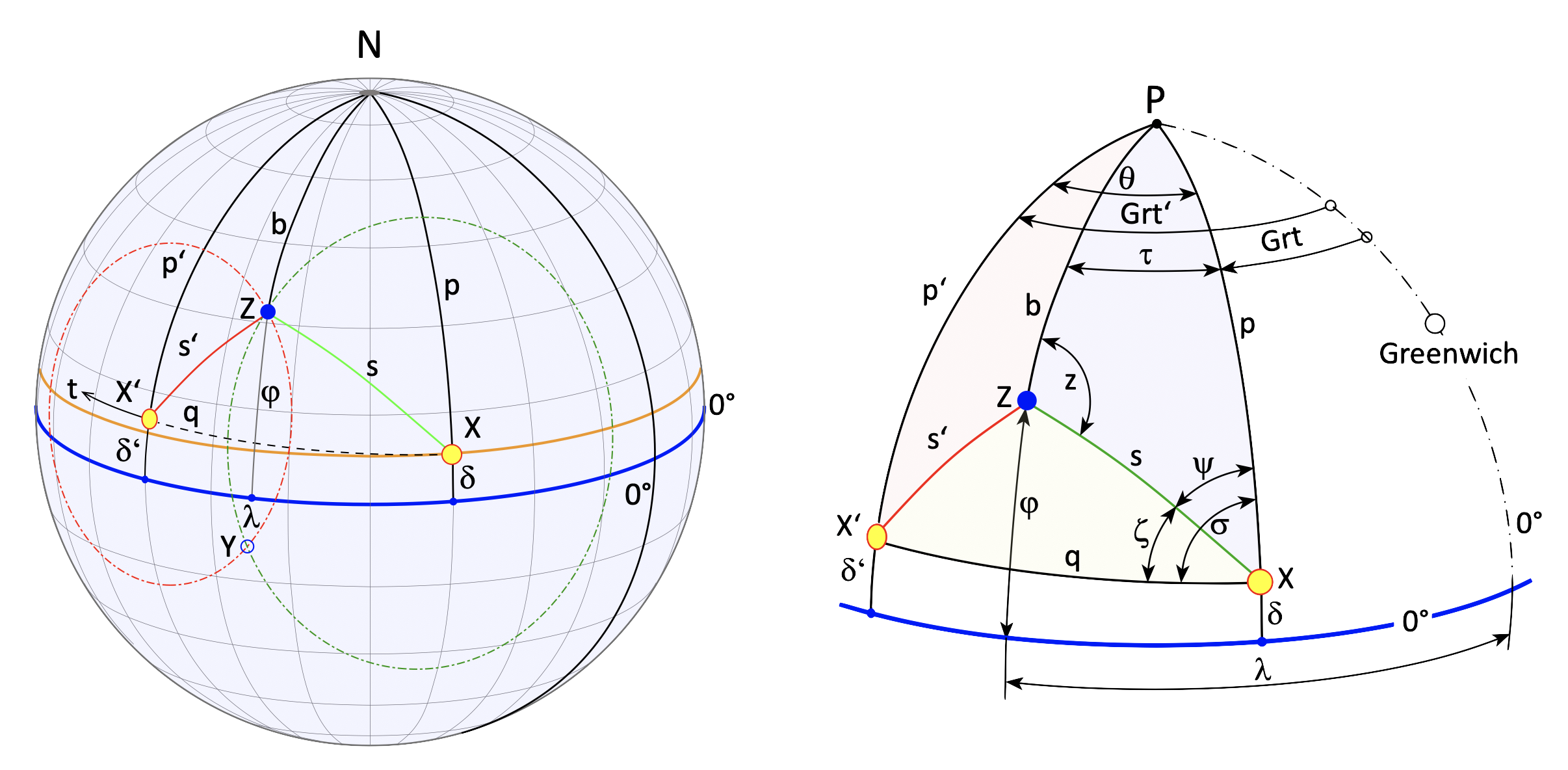
Eine Berechnung des Standortes ist im Grunde eine einfache Geometrieaufgabe. In der vorstehenden Abbildung sind alle Elemente vorhanden, um den Rechenweg gut erklären zu können. Darin sind P der Nordpol, sowie X und X’ die Positionen der Sonne bzw. ihres Bildpunktes in den Zeitpunkten einer ersten und zweiten Beobachtung. Der zentrale Punkt Z ist der Zenit eines Beobachters und damit der Standort eines Schiffes.
Diese vier Punkte bilden insgesamt vier Kugeldreiecke aus. Das große Dreieck XPX’ umrandet drei kleinere Dreiecke, bestehend aus den beiden Polardreiecken XPZ und X’PZ, gebildet aus einer ersten und einer späteren zweiten Beobachtung der Sonne. Schließlich gibt es noch das dritte zentrale Dreieck XZX’.
Alle Dreiecke werden von Großkreisbögen umrandet. So enden die Winkel ζ und σ nicht auf der Deklinationslinie, dem Weg des Sonnenbildpunktes, denn das ist kein Großkreis. Sie enden auf dem Großkreisbogen q, der kürzesten Verbindung zwischen den Sonnenbildpunkten X und X’. Bei den Seiten s und s’ handelt es sich um die Komplemente der jeweils beobachteten Höhen der Sonne, denn es gilt s = 90° – h und s’ = 90° – h’. Dass es dabei ebenfalls um Großkreisbögen geht, ist einfach zu beweisen. Der kürzeste Abstand zwischen zwei Punkten auf einer Kugel folgt bekanntlich einer Großkreislinie. Eine direkte Sichtverbindung zu einem Gestirn folgt ebenfalls einer kürzesten Verbindung und diese Sichtlinie liegt deckungsgleich senkrecht über dem Großkreisbogen. Die Seiten p, p’ und b folgen Meridianen und sind damit sowieso Großkreisbögen. Die Seite b ist eine gemeinsame Seite der beiden Polardreiecke und zugleich das Komplement der Standortbreite  . Die Aufgabe besteht zunächst darin, die Bogenlänge, also das Bogenmaß der Seite b zu berechnen.
. Die Aufgabe besteht zunächst darin, die Bogenlänge, also das Bogenmaß der Seite b zu berechnen.
Berechnung
Das Bild zeigt die zwei Polardreiecke XZP und X’ZP die über eine gemeinsame Seite b verfügen. Wie Seiten und Winkel mit dem Kosinus Seitensatz in einem Polardreieck berechnet werden, ist im Beitrag „Die Sonne am Himmel“ bereits ausführlich beschrieben worden. Dieser Formelsatz ist in zwei Varianten verwendbar:
- A Bekannt sind zwei Seiten und der davon eingeschlossene Winkel – berechnet wird die dritte Seite.
- B Bekannt sind alle drei Seiten – berechnet wird ein beliebiger Winkel.
Die Seite b kann damit ganz einfach in fünf aufeinanderfolgenden Schritten berechnet werden:
- Nach A wird mit den Seiten p und p‘ des umfassenden Dreiecks und dem davon eingeschlossenen Winkel
 zunächst die Seite q berechnet.
zunächst die Seite q berechnet. - Damit sind von diesem Dreieck XPX‘ alle Seiten bekannt und der Winkel
 kann nach B bestimmt werden.
kann nach B bestimmt werden. - Da nach der Berechnung von q jetzt auch alle Seiten des zentralen inneren Dreiecks XZX‘ bekannt sind, die Seiten s und s‘ sind die Komplemente der Sextantenmessungen, kann in derselben Weise gemäß B auch der Winkel
 bestimmt werden.
bestimmt werden. - Jetzt muss die Winkeldifferenz
 ausgerechnet werden. Das ist der Winkel gegenüber der gesuchten Seite b.
ausgerechnet werden. Das ist der Winkel gegenüber der gesuchten Seite b. - Somit ist der Winkel
 zwischen den bekannten Seiten p und s bekannt und die gegenüberliegende Seite b kann unter Anwendung der Regel B berechnet werden. Die Seite b liefert mit
zwischen den bekannten Seiten p und s bekannt und die gegenüberliegende Seite b kann unter Anwendung der Regel B berechnet werden. Die Seite b liefert mit  die gesuchte Standortbreite des Punktes Z, also die Breite des Schiffsortes.
die gesuchte Standortbreite des Punktes Z, also die Breite des Schiffsortes.
Diese klare Abfolge von Berechnungen hätte damals jedoch mit Logarithmen ausgeführt werden müssen. Das aber war für die seemännische Praxis viel zu mühsam und zeitaufwendig und darum nicht zu gebrauchen. Vielleicht hat es aber doch das eine oder andere Schiff gegeben, das sich dieser Rechenmethode zugewandt hatte. Allgemein konnte sie sich in der Seefahrt nicht etablieren.
Um die Berechnungen abzukürzen, hat man nach anderen Methoden gesucht, die ebenso sicher zum Ziel führen sollten. In der Mitteilung des Herrn von Zach sind dahingehend auch recht viele Publikationen namhafter Wissenschaftler aufgeführt. Man fiindet dort u. a. den Namen Leonhard Euler, der ein herausragender Mathematiker und Naturwissenschaftler war, oder Daniel Bernoulli, ein Freund Eulers. Bernoulli ist heute vor allem als Physiker und Begründer der Strömungslehre bekannt.
So waren zur Breitenbestimmung bis weit ins 19. Jhd. hinein nur die Mittagsbreite oder die Nordsternbreite oder die Tafelmethode von Cornelis Douwes in Gebrauch. Trotzdem sollen hier die exakten Berechnungen präsentiert werden, weil sie durchaus als präziseste Navigationsmöglichkeit in der zweiten Hälfte des 18. Jhd. bekannt waren.
Berechnung der Breite
Das Ganze ist also recht übersichtlich und wir wollen den Plan auch gleich formeltechnisch umsetzen. Gebraucht wird dazu lediglich der Kosinus Seitensatz.
1) Gemäß A. gilt für die Grundseite des umfassenden Dreiecks die Gleichung:

Nach Einsetzen von p = 90° –  und p‘ = 90° –
und p‘ = 90° –  folgt daraus
folgt daraus

Nach den Komplementbeziehungen der cos und sin Kreisfunktionen gilt aber cos(90° – x) = sin x und sin(90° – x)= cos x . Somit ergeben sich aus den Deklinationen  und
und  . Damit wird die Gleichung vereinfacht und lautet jetzt:
. Damit wird die Gleichung vereinfacht und lautet jetzt:

Wir brauchen aber q und nicht cos q und das geht einfach mit der Umkehrfunktion arccos oder cos-1, was dasselbe ist. Die Seite q erhalten wir schließlich mit der Formel
(1) 
Zur Einführung wurde die Berechnung von q ausführlicher dargestellt.
2) Die Berechnung des Winkels σ erfolgt unter Anwendung von B:
![\[\cos \sigma= \frac{\cos p'-\cos p\cdot\cos q}{\sin p\cdot\sin q}\cdot\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-b0c5893d9010442715a7c7b94695f013_l3.png "Rendered by QuickLaTeX.com")
Nach Verwenden der Komplementbeziehungen aus den Deklinationen wie schon zuvor und der Umkehrfunktion folgt daraus:
(2) 
3) Was im großen Dreieck die Seiten p und p’ darstellen machen im kleinen zentralen Dreieck die Seiten s und s’ aus. Die Formel zur Berechnung des Winkels ζ ist also analog dieselbe wie in 2)
(3) 
Hierin wurden die Komplementbeziehungen der gemessenen Höhen verwendet.
4) Um gemäß A die Seite b berechnen zu können, muss der Winkel zwischen den Seiten p und s bekannt sein. Dieser ist die Differenz
![\[\psi=\sigma -\zeta\cdot\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-398169cdd85b55bf4f8b80fe042c5a9a_l3.png "Rendered by QuickLaTeX.com")
5) Die Seite b ist das Komplement der Breite . Man könnte also formal b berechnen und von 90° subtrahieren, woraus die Breite folgt. Besser ist jedoch, anstelle der Seite b gleich das Komplement von b, und damit die Breite zu berechnen. Dazu muss dann aber die Arcussinusfunktion angewendet werden. Wir schreiben deshalb:
(4) ![\begin{equation*}\boxed{\varphi=\sin^{-1}\bigr [\sin \delta\cdot\sin h+\cos \delta\cdot\cos h\cdot\cos (\sigma-\zeta)\bigr ]}\cdot\end{equation*}](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-343b3ce2b4673d20bf5a8a3eaca8ea1d_l3.png "Rendered by QuickLaTeX.com")
Das Bild zeigt, dass auch ein alternativer Standort Y möglich ist. Dieser wäre dann zu berechnen, wenn der eigene Standort südlich von der aktuellen Deklinationsbreite liegt, die Sonne am Schiffsmittag also nördlich beobachtet werden kann. Zur Unterscheidung des nördlichen vom südlichen Standorts, müssen die in den Gleichungen eingesetzten Deklinationen und die errechnete Breite mit einem Faktor P multipliziert werden. Dabei wird mit P = 1 der nördliche und mit P = -1 der südliche Standort der Schnittpunkte der Höhenkreise berechnet. In den Gleichungen 1 bis 4 ist also immer nur  ,
,  und
und  zu verwenden.
zu verwenden.
Berechnung der Länge
Die Länge  wird wie eine Chronometerlänge berechnet. Wir kennen die Zeiten, in denen die Beobachtungen durchgeführt wurden. Gemäß dem Bild auf der rechten Seite ist die Standortlänge die Summe aus dem Stundenwinkel bzw. Polwinkel
wird wie eine Chronometerlänge berechnet. Wir kennen die Zeiten, in denen die Beobachtungen durchgeführt wurden. Gemäß dem Bild auf der rechten Seite ist die Standortlänge die Summe aus dem Stundenwinkel bzw. Polwinkel  und dem Greenwichwinkel Grt. Das gilt allerdings nur, wenn die erste Beobachtung am Vormittag erfolgte. Wird sie erstmalig am Nachmittag beobachtet, dann muss Grt – gerechnet werden. Man muss allerdings wissen, dass der Ortsstundenwinkel für Greenwich erst in der Mitte des 19. Jhd. eingeführt wurde. In der Zeit davor musste man sich noch mit der Zeitgleichung herumplagen. Weil es hier vor allem um das Verstehen der Methode geht, bleiben wir bei dem einfacher zu handhabenden Greenwichwinkel Grt.
und dem Greenwichwinkel Grt. Das gilt allerdings nur, wenn die erste Beobachtung am Vormittag erfolgte. Wird sie erstmalig am Nachmittag beobachtet, dann muss Grt – gerechnet werden. Man muss allerdings wissen, dass der Ortsstundenwinkel für Greenwich erst in der Mitte des 19. Jhd. eingeführt wurde. In der Zeit davor musste man sich noch mit der Zeitgleichung herumplagen. Weil es hier vor allem um das Verstehen der Methode geht, bleiben wir bei dem einfacher zu handhabenden Greenwichwinkel Grt.
Die Aufgabe besteht also zunächst darin, den Stundenwinkel auszurechnen. Das geht wieder nach dem bekannten Prinzip einer Winkelberechnung, wenn alle Seiten bekannt sind. Für den Polwinkel erhalten wir an dieser Stelle
![\[\cos \tau=\frac{\cos s-\cos p\cdot\cos b}{\sin p\cdot\sin b}\cdot\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-426e0e48ee52b00ee160a2ce8080baff_l3.png "Rendered by QuickLaTeX.com")
Nach Ersetzen der Seiten mit ihren Komplementen und Anwendung der Umkehrfunktion folgt daraus
![\[\tau=\cos^{-1}\frac{\sin h-\sin \delta\cdot\sin \varphi}{\cos \delta\cdot\cos \delta}\cdot\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-5222aee25bf27b5d69bda2feef8d58f4_l3.png "Rendered by QuickLaTeX.com")
Für die Standortlänge folgt zunächst:
(5) 
Dabei stellt sich noch die Frage, ob der Stundenwinkel addiert oder subtrahiert werden soll. Wenn die erste Beobachtung am Vormittag erfolgte, dann wird addiert. Subtrahiert wird, wenn die erste Beobachtung nachmittags erfolgte. Besonderheiten treten auf, wenn das Datum zwischen erster und zweiter Beobachtung nicht das gleiche ist.
Dieser mit einem Sternchen gekennzeichnete Längengrad darf nur zwischen 0° und 360° betragen. Um das zu sichern, müssen Ergebnisüberträge behandelt werden. Hat die Gl. 5 ein negatives Ergebnis, dann müssen 360° addiert werden. Ist das Ergebnis größer als 360° dann müssen 360° subtrahiert werden. Anschließend kann mit der folgenden Gleichung eine Normierung auf Westgrade und Ostgrade erfolgen.
(6) 
Die Gleichung wird folgendermaßen gelesen: Liegt  zwischen 0° und 180°, dann erhält die Länge ein negatives Vorzeichen, weil es eine Westlänge ist. Liegt zwischen 180° und 360°, dann sind 360° davon zu subtrahieren und es handelt sich um Ostgrade.
zwischen 0° und 180°, dann erhält die Länge ein negatives Vorzeichen, weil es eine Westlänge ist. Liegt zwischen 180° und 360°, dann sind 360° davon zu subtrahieren und es handelt sich um Ostgrade.
Versegelung
Wenn mit der Sonne navigiert wird, muss zwischen den Beobachtungen eine angemessene Zeit verstreichen. Dabei kommt es, wenn nicht gerade Totenflaute herrscht, zu einer Ortsveränderung. Die während der ersten Beobachtung beobachtete Höhe gilt nicht mehr und muss auf den Ort der zweiten Beobachtung hochgerechnet werden. Das kennt eigentlich jeder. Je näher man sich z. B. an ein Bauwerk annähert, um so steiler hinauf muss der Blick gehen. Genau so ist es auch mit der Sonne. Man nähert oder entfernt sich ihr zwar nicht, aber man bewegt sich auf der Rundung der Erdkugel in Richtung Sonne oder weg davon und dabei neigt sich der eigene Beobachtungshorizont, was zu einem gleichen Ergebnis führt.
Nach einer Ortsveränderung, die als Versegelung bezeichnet wird, befindet sich ein Beobachter am Standort Z und die Höhe der wahren Sonne wird mit h’ gemessen, woraus sich ein Zenitabstabd von s’ = 90° – h’ ergibt. Die Sonne X steht dabei unverändert auf der mit Grt und angegebenen Position, wie zum Zeitpunkt der ersten Beobachtung. Wenn zwischen den Beobachtungszeiten keine Ortsveränderung erfolgt ist, kann der Standort mit s = 90° – h, wie oben beschrieben, berechnet werden. Wurde in der Zwischenzeit jedoch gesegelt und Z ist jetzt ein anderer Standort wie zum Zeitpunkt der ersten Beobachtung, dann muss die Höhe der Sonne X dem neuen Standort angepasst werden. Das geschieht in der Weise, dass der Radius s des Höhenkreises der ersten Beobachtung so vergrößert oder verkleinert wird, dass er jetzt wieder genau auf den veränderten Standort Z passt. Es muss praktisch ein Zustand hergestellt werden, als würde man beide Sonnen, die echte und die eingebildete aus der ersten Beobachtung, zur selben Zeit beobachten. Wie das zu berechnen ist, stammt von Cornelis Douwes, den man zu seiner Zeit zurecht als „Mathematical Seamen“ betitelte. Es gilt nämlich
(7) 
Hierin ist d die Distanz der Ortsveränderung über Grund in nautischen Meilen und c der über Grund gefahrene resultierende Kurs. Die Distanz d in NM muss bei dieser Rechnung in Grad verwandelt werden, was dadurch geschieht, dass d durch 60°/NM dividiert werden muss. Halsen, Wenden und Abdriften durch Strom und Wind sind mit einer Koppelrechnung (Dead Reckoning) zu berücksichtigen. Das in dieser Gleichung verwendete Azimut z ist das zum Zeitpunkt der ersten Beobachtung. Für die meisten Ansprüche würde hier sogar eine Kompasspeilung ausreichen. So würde man am Standort Z zuerst die versegelte hs nach der vorstehenden Gl. 7 ausrechnen und in den Gleichungen 3 und 4 anstelle der Höhe h verwenden. Die Gln. 4 und 5 liefern dann sofort Breitengrad und Längengrad des versegelten Standortes.
Will man das Azimut jedoch genau ermitteln, was beispielsweise in Frage kommt, wenn eine Navigationssoftware nach dieser Zweihöhenmethode geplant ist, dann muss folgende Formel angewendet werden:
(8) 
Hierin ist  der Ortsstundenwinkel LHA. Sein Wert liegt immer zwischen 0° und 360°. Das Azimut ist die Peilung auf die Sonne und überschreitet deshalb am Schiffsmittag den Wert von 180°. Der Arkus des Kosinus kann aber nur Werte bis 180° liefern. Deshalb muss der ab dem Schiffsmittag abnehmende Arkus des Kosinus von 360° abgezogen werden und damit nimmt das Azimut wieder zu. Aus diesem Grunde gelten für das Azimut zwei Formeln, eine für vormittags und eine für Beobachtungen am Nachmittag.
der Ortsstundenwinkel LHA. Sein Wert liegt immer zwischen 0° und 360°. Das Azimut ist die Peilung auf die Sonne und überschreitet deshalb am Schiffsmittag den Wert von 180°. Der Arkus des Kosinus kann aber nur Werte bis 180° liefern. Deshalb muss der ab dem Schiffsmittag abnehmende Arkus des Kosinus von 360° abgezogen werden und damit nimmt das Azimut wieder zu. Aus diesem Grunde gelten für das Azimut zwei Formeln, eine für vormittags und eine für Beobachtungen am Nachmittag.
Da wir von Gl. 5 geliefet wird, ist sie mit der Höhe h berechnet. Der Längengrad nach Versegelung kann deshalb nur dadurch berechnet werden, indem mit hs in die Gl. 3 eingestiegen und die gesamte Berechnung bis zur Gl. 6 erneut durchlaufen wird.
Logarithmische Berechnung
Die Berechnung eines Standortes konnte im 18. Jahrhundert nur mit Logarithmen erfolgen. Damit werden Multiplikationen zu Additionen. Es gab zahlreiche Tafelwerke mit Zahlentabellen über Logarithmen von Zahlen und allen Winkelfunktionen. Um damit besser arbeiten zu können, wurden einige Gleichungen für eine Bearbeitung mit Logarithmen extra umgestellt. Wir wollen jetzt die Standortbreite an einem Beispiel logarithmisch berechnen. Dazu müssen wir die Gln. 2 und 3 erstmal in die entsprechende Form bringen. In der Gl. 2 subtrahieren wir auf beiden Seiten eine 1 und erhalten

Auf einen Nenner gebracht folgt daraus

Ein Additionstheorem der trigonometrischen Funktionen lautet:

Damit vereinfachen wir den Klammerausdruck im Zähler und erhalten:

Der Zähler dieser Gleichung wird jetzt mit einer der Verwandlungsformeln der Kreisfunktionen umgestellt. Diese Verwandlungsformel lautet:

Angewendet auf die vorhergehende Gleichung kommt eine andere Fassung des Kosinus Seitensatzes heraus:

Wenn jetzt noch für die Funktionen im Nenner die Secans Funktion sec x =1/cos x und die Kosekans Funktion csc x =1/sin x angewendet wird, dann folgt schließlich:
(9) 
Die Gl. 3 bekommt die gleiche Form. Dabei werden nur gegen h und gegen h‘ ausgetauscht:
(10) 
Mit Hilfe von Logarithmen werden wir nun eine Standortbreite berechnen. Die Deklinationen und die berichtigten Höhen sind in der nachfolgenden Tabelle aufgeführt. Die Beobachtungen erfolgten um 9:28:53 GMT und 12:1:23 GMT, woraus sich eine Zwischenzeit von 2:32:30 h errechnet. Diese Zeit in Grad verwandelt liefert einen Winkel von 38,15°. Die Tabelle enthält zusätzlich die entsprechenden Winkel im Bogenmaß.
Legen wir also los und berechnen zunächst q, wozu die Gl. 1 in ihrer ursprünglichen Form auch für eine Lösung mit Logarithnen benutzt wird. Für die Berechnung von und benutzen wir die Gl, 10 und 11, weil die Originalformeln 3 und 4 in einer logarithmischen Verwendung doch einige Schwierigkeiten verursacht hätten. Die nachfolgenden Zahlenwerte sind im Bogenmaß angegeben. 1) negative Zahlen haben keinen Logarithmus. Wenn Faktoren negativ sind, wie hier ein Sinus, dann ist der Logarithmus des positiven Faktors zu bilden. 2)Nach dem Delogarithmieren ist das Ergebnis so oft mit -1 zu multiplizieren, wie negative Faktoren vorhanden waren.
1) negative Zahlen haben keinen Logarithmus. Wenn Faktoren negativ sind, wie hier ein Sinus, dann ist der Logarithmus des positiven Faktors zu bilden. 2)Nach dem Delogarithmieren ist das Ergebnis so oft mit -1 zu multiplizieren, wie negative Faktoren vorhanden waren.
Die logarithmische Berechnung ist dann doch schon recht mühsam. Man muss etwa 30-mal in eine Tafel gehen, Zahlen heraussuchen und interpolieren. Nebenbei fallen auch noch etwa 15 Additionen bzw. Subtraktionen an. Nach dieser ganzen Rechnerei, die schon eine Stunde dauern kann, weiß man nicht, ob das Ergebnis auch richtig ist und die Länge des Standortes ist auch noch nicht bekannt. Die Längenberechnung mittels Logarithmen soll jetzt aber nicht mehr vorgeführt werden.
Resümee
Nach der vorstehend beschriebenen Lösung des Zweihöhenproblems kann ein astronomischer Standort mit hoher mathematischer Präzision ausgerechnet werden. Sofern die Zeit am Nullmeridian den Beobachtungszeiten zugeordet werden kann, ist damit auch eine Längenberechnung möglich.
Es gibt jedoch einige Dinge zu beachteten. Da ist einmal die Wahl des zu berechnenden Standortes, denn es sind grundsätzlich zwei Standorte möglich, die jeweils nördlich oder südlich der Deklinationsbreite liegen. Bei der Sonne als Navigationsgestirn muss man deshalb wissen, ob nördlich oder südlich von der Deklinationsbreite gesegelt wird.
Ein weiterer Punkt ist die Festlegung der Peilrichtung. Im Bild erfolgt die erste Beobachtung an einem Vormittag und die zweite an einem Nachmittag. Der Standort Z kann aber auch westlich des Bogens p‘ liegen, dann erfolgen beide Beobachtungen vormittags. Liegt der Punkt Z östlich des Bogens p, dann erfolgen beide Beobachtungen am Nachmittag. Die Peilrichtung zu wissen, ist zur späteren Berechnung der Länge wichtig, besonders dann wenn sich das Datum zwischen den Beobchtungen ändert.
Eine Anwendung dieses Rechenweges liefert bei programmierter Anwendung stets beste Ergebnisse. Eine Höhenbegrenzung in der Beobachtung, wie bei den grafischen Verfahren üblich, existiert nicht und eine vorherige Standortschätzung ist unnötig. Also nur Vorteile. Doch leider waren diese Vorteile damals nicht nutzbar, wei als Rechenhilfen lediglich Logarithmentafeln verfügbar waren und so wurde die Methode verworfen.
Links:
nach oben ♦ Die Sonne am Himmel ♦ Mittagsbreite und Chronometerlänge ♦ Die Methode des Marcq Saint Hilaire ♦ Thomas H. Sumner, Begründer der Standliniennavigation ♦ Navigieren mit Excel ♦ Ein wenig Sextantenkunde ♦ Sextantentest Mark 25 ♦ Downloads ♦ Home