Die Zephir hat zwei Steuerstände und an jedem Steuerstand sind neben dem Kugelkompass sämtliche installierten elektronischen Navigationseinrichtungen verfügbar. Diese bestehen aus je einem 12 Zoll Kartenplotter des Typs Zeus 2, jeweils zwei 5 Zoll Grafikdisplays des Systems H5000 und jeweils einem H5000 Autopilot Controller. Alle Displays sind auch bei direkter Sonneneinstrahlung gut ablesbar. Die Verarbeitung der von den Sensoren gelieferten Daten, insbesondere der Winddaten, übernehmen insgesamt drei zusätzliche Rechner, CPU’s genannt, zwei für die Anzeigen und einer für die Autopilotsteuerung.

Eine Erleichterung insbesondere bei einsamen Nachtfahrten ist das Go Free Modul. Mit diesem kann man einen Kartenplotter auf ein Tablet spiegeln. Man muss also bei Sauwetter nicht unbedingt am Steuerstand stehen sondern kann sich irgendwohin ins Trockene verziehen und von dort aus z. B. das Radarbild beobachten. Die Bedienung des Autopiloten ist aus Sicherheitsgründen nur vom Steuerstand aus möglich.

Das System ist modular aufgebaut gestattet also den Anschluss von sehr vielen unterschiedlichen Sensorsystemen. Beispielsweise wären für die Sonartechnik insgesamt drei verschiedene Systeme verfügbar, das normale Echolot, das Forward-Scan System und das Structure-Scan Echolot. Alle drei auf einmal sind jedoch nicht anschließbar. Auf der Zephir gibt es dann auch nur den normalen Tiefenscan und das Forward-Scan System, das seichte Stellen vor dem Schiff erkennt. Es ist aber nur bei langsamer Fahrt in sauberem Wasser zu gebrauchen. Weitere Module auf der Zephir sind das Radar- Modul, die Wind Sensoren für Richtung und Geschwindigkeit, der Bootspeed Sensor, der Ruderlagengeber und der Fluxgate Kompass.
Alle Sensoren und Rechner kommunizieren über ein Bus-System. Das ist heutzutage üblich, hat aber auch eine Schwachstelle. Eine Störung auf dem Bus könnte die gesamte Navigation mit Ausnahme der Kugelkompasse lahmlegen.
An dieser Stelle den Funktionsumfang der Navigationstechnik beschreiben zu wollen ist leider unmöglich. Wirklich bemerkenswert sind die Funktionen zum Segeln. Laylines auf dem Kartenplotter erleichtern das Festlegen optimaler Kreuzkurse. Ausserdem kann bestimmt werden, ob ein bestimmter Kurs nach Kompass gefahren werden soll oder ob der Autopilot einem bestimmten Windeinfallwinkel folgen soll. Möglich sind auch Wenden und Halsen auf Knopfdruck. Das ermöglicht die Selbstwendefock. Zum Wenden muss der Bullenstander vorher gelöst werden und zum Halsen muss man diesen auf der Spiwisch vorsichtig fieren.
Das Radar ist ein sogenanntes hochauflösendes G4 Radar. Das „hochauflösend“ bezieht sich wahrscheinlich nur darauf, dass das direkte Umfeld des eigenen Bootes, also auch des Nachbarbootes am Steg erfasst werden können sollte. Das interessiert aber niemanden. Ansonsten ist es ziemlich grob auflösend. Mit einem konventionellen Radar auf einem meiner früheren Boote konnte ich im Dunkeln sogar die Flaggen der Fischernetze ausmachen und das ohne irgendeine Range-Einstellung, einfach nur so. Davon sind die neuartigen hochauflösenden 3G und 4G Radarsysteme noch weit entfernt. Das untenstehende Bild ist mit einer Range-Einstellung von 100 m gemacht. Die Boote in den Nachbarboxen links und rechts werden dabei nicht erfasst, obwohl sie vorhanden sind.

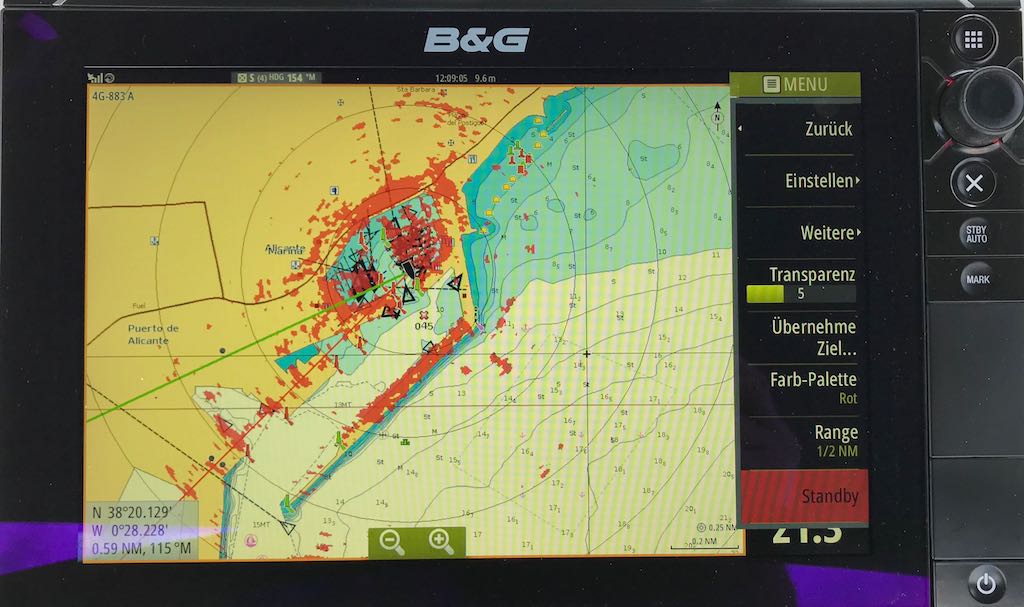
Weiterhin stören die vielen Einstellungen die z. B. nach jeder neuen Range-Einstellung korrigiert werden müssen, um überhaupt etwas Vernünftiges erkennen zu können. Nervig ist auch, dass sich die Peilwinkeleinstellung dauernd verändert. Das ist wahrscheinlich auf Temperaturdriften in der Elektronik zurückzuführen. Einzig vorteilhaft ist der deutlich niedrigere Energiebedarf. Man kann das Radar also betreiben ohne dass die Batterie allzusehr beansprucht wird.
Das Radar ermöglicht die Definition von Gefahrenzonen. Gelangt ein Ziel in eine dieser zwei möglichen Zonen, dann ertönt ein Alarm, der jedoch ziemlich leise ist. Das liegt aber an dem eingebauten akustischen Signalgeber. Nervig ist, dass der Alarm für dieses Ziel nicht quittiert werden kann. Man kann ihn nur abstellen und er kommt dann gleich wieder. So bleibt nur, will man nicht dauernt mit Alarm Abstellen beschäftigt sein, Alarme zu deaktivieren. Man darf dann jedoch nicht vergessen, diese wieder zu aktivieren, wenn das Objekt aus der Gefahrenzone heraus ist.
Sehr hilfreich ist das AIS, das automatische Kollisionsverhütungssystem. Auf der Zephir kann es gleichzeitig die Daten der im Umkreis verkehrenden Schiffe empfangen und gleichzeitig die eigenen Daten aussenden. Anhand der Daten, die auch die MMSI enthalten, könnte man dann gleich eine Funkverbindung mit einem anderen Schiff aufnehmen.
Der Autopilot ist unverzichtbar auf längeren Reisen. Meist funktioniert er auch ganz gut, aber es gibt oft Wetterbedingungen mit denen er nicht zurecht kommt. Dann drehen die Ruder periodisch eine halbe Drehung nach links und dann eine halbe nach rechts und das Boot fährt Schlangenlinien. Einstellungsänderungen bringen in dieser Situation nichts. Sie halten entweder nicht lange vor oder machen alles noch schlimmer. In derselben Wind- und Wellensituation gelingt eine manuelle Steuerung mit Ruderbewegungen von zwei Handbreiten vollkommen. Besonders anfällig ist der Autopilot bei Am-Wind Kursen und etwas höherem Seegang. Wenn der Bug mal stärker aus dem Kurs geworfen wird dann hat der Autopilot so seine Not, das Schiff wieder auf Kurs zu bringen.
Der Grund dafür sind m. E. die zahlreichen verschiedenen einzustellenden Parameter. Es gibt bestimmt eine optimale Einstellung, doch wie soll man diese finden? Bei ruhigem Wetter funktionieren augenscheinlich sehr viele Einstellungen. Hat man eine Reise erst mal begonnen und der Autopilot kommt mit dem Wetter nicht mehr zurecht, dann hat man mit kleiner Crew gleich zwei Probleme. Das Schiff erfordert erhöhte Aufmerksamkeit und man kämpft gleichzeitig mit den Einstellmöglichkeiten um eine Verbesserung. Letztendlich verzichtet man entnervt auf den Autopiloten und steuert manuell.

Die unter-Deck Zentrale ist die Navigations-Ecke der Zephir. Auf einem recht übersichtlichen Panel sind alle wichtigen Daten, wie Ladezustände und Füllstände ablesbar und es können alle elektrisch betriebenen Verbraucher und Geräte gesteuert werden. Hier befindet sich auch das Funkgerät, das mit einem Mobilteil ausgerüstet ist. Trotzdem ist ein zusätzliches Handfunkgerät auch dann noch sinnvoll.
Der Schreibtisch hat zwei Klappen, unter denen allerhand Dinge wie Seekarten, Photoausrüstung, Notebook, Kleinwerkzeuge usw. untergebracht werden können. Vorhanden ist auch eine kleine Borte für die wichtigste Bordliteratur.
![]()