
Standort mit Sextant, Handy oder Tablet – ganz stressfrei, kein Nautisches Jahrbuch, kein Rechnen, kein Zeichnen, kein Schätzort und mathematisch präzise.
In diesem Beitrag erstellen wir ein Excel Sheet, mit dem Standorte auf hoher See mit einem Sextanten nach der analytischen Methode von Carl Friedrich Gauß mit hoher Genauigkeit bestimmt werden können. Excel und Word von Microsoft sind weit verbreitete Büroprogramme, die fast jeder auf seinem heimischen Computer hat. Zwar kann auch ein Handy den GPS Standort aus Satellitensignalen anzeigen, doch darum geht es nicht. Es ist schon etwas anderes, wenn man selbst die Berechnungsformeln in eine Excel Tabelle bringt und dabei lernt, wie ein Standort mit einem Sextanten aus dem Lauf der Sonne heraus bestimmt werden kann. Nebenbei lernt man auch gleich Excel zu verstehen, was im normalen Leben gewiss seine Vorteile hat.
Als es noch keine Computer gab, waren grafische Methoden die einzige Möglichkeit, einen Standort auf See zu bestimmen. Diese kamen in der Mitte des 19. Jahrhunderts auf, nachdem Kapitän Thomas H. Sumner die Standlinie erfunden hatte. Der französische Fregattenkapitän Saint Hilaire fand dafür schließlich eine optimale Lösung. Sie vermittelten eine recht gute Sicherheit und haben sich rasch verbreitet. Doch heute haben wir Computer und da wäre es völliger Unfug, mit großem Aufwand eine grafische Methode auch noch digitalisieren zu wollen, die sowieso nur eine Näherungslösung ist. Zur Digitalisierung geeignet sind die präzise und direkt arbeitenden algebraischen Methoden, die damals schon länger bekannt waren und heute, zugeschüttet vom Höhendifferenzverfahren, erst wieder entdeckt werden müssen.
Unsere Excel-Navigationsdatei enthält folgende Funktionen:
- grafisch ansprechende Eingabe und Ausgabe von Daten
- Standortbestimmung nach Carl Friedrich Gauß (1809)
- Berücksichtigung einer Versegelung nach Douwes (um 1750)
- automatische Sextantenbeschickung von Höhen ab 7°
- Berechnung des Greenwichwinkels Grt und der Deklination

- Grafiken
Bei Benutzung dieser Navigations-Datei erfolgt die Sextantenbeschickung automatisch und auch die Sonnenpositionen Grt und werden anhand der eingegebenen Zeit berechnet. Ein Anwender der Excel Datei muss nichts von Astronomie und nichts von Mathematik verstehen.
Der Vorteil einer Sextantennavigation ist, dass der Kartenplotter außerhalb einer sichtbaren Küste ausgeschaltet bleiben kann. Das spart nicht nur Strom, es lenkt die Aufmerksamkeit wieder stärker auf die Umgebung. Nötig ist jedoch eine Papierkarte zur Orientierung und Absetzung eines Kurses. Wir beschränken uns auf das Navigationsgestirn Sonne, weil diese mit keinem anderen Gestirn verwechselt werden kann. Viele Handelskapitäne in früherer Zeit haben ausschließlich und erfolgreich mit der Sonne navigiert. Sind die Gewässer komplizierter, kann der Kartenplotter wieder in Betrieb gehen.
Fehlerbetrachtung
Die Methode von Gauß rechnet außerordentlich präzise. Trotzdem muss mit Standortabweichungen gerechnet werden, die insbesondere auf Ungenauigkeiten bei der Höhen- und Zeitmessung beruhen. Deshalb sollte hier viel geübt werden. Ein Anfänger kann froh sein, wenn er einen Standort auf 5 Meilen genau bestimmt. Ein Könner bringt es bei ruhiger See auf vielleicht zwei Meilen Standortabweichung.
Man könnte meinen, dass ein selbst gemachtes Programm, mit selbst berechnetem Greenwichwinkel und selbst berechneter Deklination, wie es hier geschieht, nicht genau ist. Doch das ist Unsinn. Das Excel-Programm in diesem Beitrag ist genauer als das bekannte und weit verbreitete Höhendifferenzverfahren von Saint Hilaire.
Beim Höhendifferenzverfahren beruhen Standortabweichungen auf unterschiedlichen Fehlern. Die wichtigsten sind Zeitmessfehler, Höhenmessfehler, Höhenfehler (h > 70°), Gissortabweichungen, schlecht gewählte Zwischenzeiten und am Ende auch Bildpunktabweichungen. Der Gesamtfehler ergibt sich nach dem Fehlerfortpflanzungsgesetz:
![\[F_{total}=\sqrt{F_1^2+F_2^2+F_3^2+ ... +F_n^2}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-54c4c428c0244ec019b8db428279862f_l3.png "Rendered by QuickLaTeX.com")
Ein geübter Navigator bringt es in der astronomischen Standortbestimmung auf einem nicht oder nur wenig schwankenden Deck auf eine totale Standortabweichung von 2 NM. Darin enthalten sind dann alle möglichen zufälligen Einzelfehler, wie sie als Beispiel wie in der nachstehenden Tabelle auftreten könnten.
| 1 | Zeitmessfehler | 0,4 | NM | ✓ |
✓ | ✓ |
| 2 | Höhenmessfehler | 1,5 | NM | ✓ | ✓ | ✓ |
| 3 | Indexfehler | 0,2 | NM | ✓ | ✓ | ✓ |
| 4 | Höhenfehler (h > 70°) | 0,4 | NM | ✓ | ✓ | – |
| 5 | Zeichenfehler | 0,2 | NM | ✓ | ✓ | – |
| 6 | ungünstiger Gissortfehler | 0,6 | NM | ✓ | ✓ | – |
| 7 | gewählte Zwischenzeit | 1,0 | NM | ✓ | ✓ | ✓ |
| 8 | Versegelung | 0,4 | NM | ✓ | ✓ | ✓ |
| 9 | Bildpunktfehler | 0,5 | NM | – | ✓ | ✓ |
| 10 | Gesamtabweichung in NM: | 1,99 | 2,06 | 1,92 | ||
Mit diesen neun Fehlern, die einzeln negativ oder positiv sein können, errechnet sich nach oben genannter Formel eine wahrscheinliche Standortabweichung von 1,99 nautischen Meilen, wenn in klassischer Manier grafisch und mit einem genauen nautischen Jahrbuch mit dem Höhendifferenzverfahren navigiert wird. Wird nun der mit 0,1′ genaue nautische Almanach gegen eine einfache Ephemeridenberechnung ausgetauscht, die einen maximalen Fehler von 0,5′ zulässt, dann erhöht sich die wahrscheinliche Standortabweichung nur auf 2,06 nautische Meilen. Das ist gerade mal ein Anstieg um maximal 3 %. Wenn andere Einzelfehler wesentlich größer sind, dann spielt die Ungenauigkeit von Grt und δ von maximal 0,5′ immer weniger eine Rolle.
Mancher mag vielleicht denken, dass bei 2 NM Abweichung ein Bildpunktfehler von 0,5 NM bzw. 0,5′ einen Anteil von 25 % haben müsste. Doch so funktioniert die Fehlerfortpflanzung nicht. Jeder zufällige Einzelfehler wirkt im Zusammenghang mit dem gesamten Fehlergemenge. Wird mit einer App navigiert, die nicht nach dem Höhendifferenzverfahren arbeitet, sondern nach der Gauß Methode, dann entfallen die Fehlernummern 4, 5 und 6 und die wahrscheinliche Standortabweichung sinkt trotz Bildpunktfehler von 0,5′ auf 1,92 nautische Meilen, also um 3,5 %. Wir halten also fest, dass eine Ephemeriden-Ungenauigkeit von maximal 0,5′ statistisch nur eine Standortabweichung von höchstens 3 % bewirken kann, wenn die Gesamtabweichung 2 NM beträgt. Bei einer Standortabweichung von insgesamt 5 NM haben falsche Ephemeriden von 0,5′ nur noch einen Anteil von 0,5 %.
Doch wie gross sind den nun wirklich die Abweichungen zwischen einfach berechneten Ephemeriden gegenüber aufwendig und exakt berechneten Ephemeriden und welche Standortabweichungen resultieren daraus? Das Ergebnis zeigt die nachstehende Grafik.

Zu sehen ist eine ganz enge Korrelation zwischen Bildpunktabweichungen und Standortrelevanz. Der Begriff Relevanz bedeutet hier, dass der Einfluss der Bildpunktabweichungen um so kleiner wird, je größer die Standortabweichungen durch andere Fehler an sich sind. So geht die Standortrelevanz mit der im Diagramm angezeigten Größe als Einzelfehler in die Fehlermenge ein und wirkt darin aber nur wie ein Einzelfehler nach dem Fehlerfortpflanzungsgesetz.
Interessant ist die höherfrequente Welligkeit der roten Kurve, die auf den Mond zurückgeht. Auf der Umlaufbahn des Erde-Mond-Systems befindet sich der Mond und damit der Systemschwerpunkt aus Sicht der Sonne mal links, mal rechts, mal weiter weg und mal dichter dran am Erdmittelpunkt. Der Erde-Mond Schwerpunkt bewegt sich auf der Umlaufbahn in einer Spirale wie die einer Spiralfeder, was die Schwingungen der roten Kurve erklärt. Die großen Wellenbewegungen sind darauf zurückzuführen, dass die Erde die Sonne in einem Jahr umrundet, die großen Planeten Saturn und Jupiter für eine Umrundung aber rund 29,5 bzw. 12 Erdenjahre brauchen. So sieht die Erde während ihres Umlaufs diese Planeten mal in Linie mit der Sonne und mal neben der Sonne, was die Gravitation beeinflusst. Alles in allem haben der Mond und die großen Planeten nur einen Einfluss von 0,5′.
Die Berechnungen der Grafiken erfolgten mit einer Excel Datei, die hier als ephem_versus_pos heruntergeladen werden kann. In dieser Datei werden für jeden Tag des Jahres 2025 für 8:00 UT und 11:00 UT die Ephemeriden nach der auf dieser Seite beschriebenen Methode berechnet und mit den Ephemeriden eines Nautical Almanac verglichen, der Grt und δ mit einer Genauigkeit von 2 Bogensekunden ausgibt. Das Ergebnis dieses Vergleichs zeigt die obige Grafik auf der rechten Seite.
Eingabenmaske
Alle Berechnungen in dieser Excel Datei sind ziemlich anspruchslos. Sämtliche Formeln liegen vor und müssen nur noch eingegeben werden. Schwieriger ist schon die Gewöhnung an die Notation von Excel. Die hier beschriebene Datei hat eine Größe von 150 KB und kann hier als
heruntergeladen werden. Das Kennwort, das zur Bearbeitung gebraucht wird lautet change. Das Passwort dient nur zum Eigenschutz, damit während der Benutzung keine Formeln mit irgend welchen Werten überschrieben werden. So kann jeder die Datei verändern und nach eigenen Ansprüchen anpassen und erweitern.
Wer ein derartiges Projekt plant, sollte als erstes eine Eingabenmaske anlegen, damit er weiß, was alles zu erledigen ist. Ein Beispiel dafür ist im Bild 2 gezeigt. Der größte Arbeitsanteil dürfte dabei auf die Rahmengestaltung und Textformatierung entfallen.

Für Eingaben und Ausgaben wurden fünf Blöcke angelegt. Die Felder mit dem grauem Hintergrund sind nicht geschützt. Wird nämlich das ganze Arbeitsblatt mit einem Passwort geschützt, dann bleiben nur diese Felder für einzugebende Daten beschreibbar. Alle anderen sind dann vor unbeabsichtigter Veränderung gesichert.
Im obersten Block werden Einstellungen vorgenommen. Indexberichtigungen können für jede Beobachtung getrennt eingetragen werden. Das ist bei Verwendung von Plastiksextanten von Vorteil, weil diese sehr temperaturabhängig reagieren und sich der Wert zwischen den Beobachtungen ändern kann. Als Indexberichtigung wird der negative Wert des festgestellten Indexfehlers eingetragen. Bei Metallsextanten wird in beide Felder die gleiche Zahl eingetragen. Eine Überprüfung, ob der Indexfehler noch aktuell ist, sollte monatlich erfolgen. Auch der Sonnenrand kann für jede Beobachtung extra angegeben werden. Es könnte ja sein, dass für eine der beiden Beobachtungen der obere oder untere Rand der Sonne klarer beobachtet werden kann.
Durch Angabe von N oder S wird festgelegt, ob ein Standort nördlich oder südlich von der aktuellen Deklinationsbreite berechnet werden soll.Dazu sollte man natürlich auch wissen, ob der eigene Standort nördlich oder südlich von der aktuellen Deklinationsbreite liegt.
In den Feldern Messung 1 und Messung 2 werden Datum, Zeit und Sextantenablesung eingetragen. Eine durch Koppelnavigation festgestellte Ortsveränderung in der Zeit zwischen der ersten und den weiteren Beobachtungen wird unter Versegelung eingetragen. Die im Bild 2 vorgenommenen Eintragungen sind als Beispiel zu verstehen, auf das im Folgenden immer Bezug genommen wird. Es ist eine Position im Atlantik, westlich von Lissabon.
Ein Standort wird sofort nach Eintragung der Daten unter Messung 2 berechnet und als Ergebnis angezeigt. Darunterstehend wird auch die Zeit des Schiffsmittags ausgegeben. Diese steht allerdings erst nach einer zweiten Beobachtung zur Verfügung.
Sextantenbeschickung
Ein Wert, der an Gradbogen und Trommel eines Sextanten abgelesen wird ist nicht der Kimmabstand bzw. die beobachtete Höhe. Diese erhält man erst durch Addition von Korrekturwerten, die zum Ausgleich von Kimmtiefe und Refraktion dienen. Weitere Korrekturen betreffen den Ausgleich des unterschiedlichen Durchmessers der Sonnenscheibe, die ist nämlich im Winter größer. Das ist dann die sogenannte Zusatzbeschickung. Außerdem ist eine Korrektur eines Indexfehlers des verwendeten Sextanten erforderlich.

Bild 3 zeigt das Sextantenbeschickungs-Modul. Der Sinn von Tabellenkalkulationen besteht darin, dass die in den Zellen angezeigten Daten nicht nur eingegebene Werte sind, sondern vor allem Ergebnisse von Formeln, die sich auf andere Zellen beziehen. So enthält die Zelle L7 die Formel
=G14+H14/60.
Das ist die vom Gradbogen abgelesene Gradzahl addiert mit der an der Trommel abgelesenen und durch 60 dividierten Anzahl der Bogenminuten und damit die dezimale Sextantenablesung. Das war jetzt ganz einfach. Zelle L8 mit der Gesamtbeschickung sieht schon komplizierter aus:
=16-(55*TAN(BOGENMASS(90-M7))/60-55/1000*(TAN(BOGENMASS(90-M7)))^3/60+
1,777*WURZEL(G8))
Das ist in Excel Schreibweise die von 16′ subtrahierte Summe der beiden nachstehenden Formeln, die für eine Gesamtbeschickung gebraucht werden, nämlich
(1) 
(2) 
Hierin ist AH die Augeshöhe. Diese Summe muss von 16’, dem halben mittleren Sonnendurchmesser, subtrahiert werden. Bei einer Beobachtung wird die Sonne meist mit ihrem Unterrand auf, manchmal aber auch mit ihrem Oberrand von unten gegen den Horizont gesetzt und nicht mit ihrer Mitte. Das muss mit plus oder minus 16’ berücksichtigt werden.
Für die Zusatzbeschickung wird eine Datenbank-Auszugsfunktion gebraucht, denn die zu verwendenden Werte sind in der Tabelle Zusatzbeschickung tabelliert und wir brauchen einen Auszug daraus. Diesen erhalten wir mit der Excel-Funktion
=DBAUSZUG(Datenbank;Datenbankfeld; Suchkriterien).
Darin ist Datenbank der Zellenbereich der gesamten Tabelle von Q6 bis R18. Datenbankfeld ist die Tabellenspalte, aus der wir einen Wert erhalten wollen, also hier die zweite Spalte. Dort wird eine 2 für zweite Spalte eingetragen oder der Name der Kopfspalte „UR“, der für Unterrand steht. Suchkriterien sind zwei übereinander anzuordnende Felder, wobei das obere den Namen der Suchspalte angibt und das untere die Suchzeile. Gewählt wurden die zwei Zellen R19 und R20. Darin werden der Spaltenname „Monat“ und darunter die Zeile mit dem Monat angegeben. In die Zelle R20 wird die Formel =MONAT(G12) eingetragen. Dadurch steht dort immer der Monat, in dem die Beobachtung erfolgt. In unserem Beispiel ist es eine 6 für den Monat Juni, so dass in der Tabelle in der Monatszeile 6 in der zweiten Spalte der Wert -0,2′ als Datenbankauszug gefunden wird.
In den Feldern H6 und H7 konnte angegeben werden, ob die Sonne mit dem Unterrand auf, oder mit dem Oberrand von unten gegen den Horizont gesetzt wird. Wird der Oberrand benutzt, dann muss der Sonnendurchmesser von 32′ subtrahiert werden. Die Datenbankfunktion muss also mit einer WENN – DANN Funktion verknüpft werden. Damit sieht die Berechnung der Zusatzbeschickung in der Zelle L9 für die erste Beobachtung so aus:
=WENN(H6=“U“;DBAUSZUG(R6:S18;2;S19:S20);
WENN(H6=“O“;-(32+DBAUSZUG(R6:S18;2;S19:S20));#NV)))
Für die zweite Beobachtung wird diese Formel in der Zelle N9 verwendet und der Bezug muss sich dort nicht auf die Zelle H6, sondern auf die Zelle H7 richten. Es könnte schließlich sein, dass zum Zeitpunkt der zweiten Beobachtung der Unterrand der Sonne von Wolken verdeckt ist.
Die beobachteten Höhen aus beiden Beobachtungen sind die Summen aller vorstehenden Zellen L7 bis L11 bzw. N7 bis N11, also zuzüglich der Indexberichtigung des Sextanten.Die Excel Namen lauten h° bzw. h_°. Deren Werte sind in Grad und Minuten darunterliegend eingetragen und als Bogenmaß in den Zellen L13 und N13. Die Excel Namen dafür lauten h und h_ . Die Variable #NV in der Formel für die Zusatzbeschickung steht für „nicht verfügbar“, wenn anstelle von „O“ oder „U“ irrtümlicherweise etwas anderes eingetragen wurde.
Sun Almanac
Wer astronomisch navigieren will, der braucht normalerweise ein Nautisches Jahrbuch, aus dem er die Position des Bildpunktes des beobachteten Gestirns für den Beobachtungszeitpunkt entnehmen kann. Das sind die Positionen, an denen das Gestirn oder die Sonne gerade im Zenit steht. Das nautische Jahrbuch wurde in Deutschland vom BSH das letzte Mal für das Jahr 2020 herausgegeben. Damit ging nach 170 Jahren eine alte Tradition zu Ende. Es ist aber, wie eingangs gesagt, kein Hexenwerk, sich diese Daten zumindest für das Navigationsgestirn Sonne selbst zu berechnen. Dazu benötigt man die Bahnelemente des Umlaufs der Erde um die Sonne.
Das Problem dabei ist nur, dass kein Jahr mit derselben Sekunde beginnt wie das nächste. Nicht mal mit derselben Minute, Stunde oder sogar Tag. Es existiert kein ganzzahliges Verhältnis zwischen der Anzahl der Eigenrotationen der Erde und ihrem Umlauf um die Sonne und somit gibt es auch keinen Kalender, dessen Tage immer genau auf ein Jahr passen. Einen gewissen Ausgleich erreicht man zwar mit Schalttagen, die in der Regel alle vier Jahre in den Kalender eingefügt werden. Doch auch dann muss man über die Jahrhunderte gesehen mal einen zusätzlichen Schalttag einführen oder auch mal einen ausfallen lassen. Für die Navigation mit der Sonne braucht man aber deren Position sekundengenau für ein bestimmtes Datum.
Daraus ergibt sich die Frage, wann die Zeitmessung eigentlich angefangen hat. Das war genau 4713 v. Chr., also vor 6735 Jahren. Bis zum heutigen Tag hat es dann auch zahlreiche Reformen gegeben. Damit man jetzt nicht immer bis zum Beginn oder bis zur letzten Reform zurückrechnen muss, wurden Etappen eingefügt und die letzte Etappe endete am 1. Januar 2000 um 12:00:00 UT. Für dieses Referenzdatum wurden die aktuellen Werte der Bahnelemente der Erde als Konstante A linearer Gleichungen abgelegt. Die Gleichungen haben alle die Form Y = A + B ・ T mit B als Koeffizient der Variablen T, der Zeit in Tagen. Die Produkte von B, als Bruch oder Dezimalzahl mit vielen Stellen nach dem Komma und der Zeit T mit ebenfalls vielen Stellen nach dem Komma beschreiben dann die mit der zukünftigen Zeit T zu erwartenden Änderungen. Die Bahnelemente lauten:

Es ist tatsächlich so, dass wir mit Hilfe dieser Gleichungen in der Lage sind, die Stellung der Erde bezüglich der Sonne auf die Sekunde genau herausfinden zu können. Wir können also genau ausrechnen, an welchem Punkt der Erde zu einem ganz bestimmten Datum und zu einer ganz bestimmten sekundengenauen Zeit, die Sonne gerade im Zenit steht, allerdings unter Vernachlässigung der Einflüsse des Mondes und der großen Planeten.
Um den Greenwichwinkel Grt und die Deklination der Sonne zu bestimmen, brauchen wir also kein Nautisches Jahrbuch mehr, sondern nur eine kleine Rechnung in Excel, wie sie im Bild 4 für zwei Beobachtungen gezeigt ist.

Die Tabelle beginnt mit der Ausrechnung der Zeiten für beide Beobachtungen, die vom 1. Januar 12:00:00 UT1 vergangen sind. Das geht relativ einfach. In der Excel Datei lautet der Name für das in K28 stehende Referenzdatum ref. Betrachten wir Datum und Zeit der ersten Beobachtung. Die Eingaben erfolgten in den Zellen G12 und G13 und haben die Namen dat und ot (ot = observation time). Die vom Referenzdatum bis zum Beobachtungszeitpunkt verstrichene Zeit in Tagen liefert die in der Zelle N18 stehende Excel Formel
=TAGE(dat;ref)+ot-0,5.
Dieser Zeit geben wir den Namen _T1. Damit können wir nun die Bahnelemente L,  , e und
, e und  ausrechnen und in die Felder N19, N20, N22 und N25 eintragen. Außer im Feld N22 werden alle errechneten Winkel im Bogenmaß eingetragen. Die Werte in der B-Spalte für die Zeit der zweiten Beobachtung errechnen sich dann analog dazu in der gleichen Weise.
ausrechnen und in die Felder N19, N20, N22 und N25 eintragen. Außer im Feld N22 werden alle errechneten Winkel im Bogenmaß eingetragen. Die Werte in der B-Spalte für die Zeit der zweiten Beobachtung errechnen sich dann analog dazu in der gleichen Weise.
Als nächstes kümmern wir uns um die Ellipsenform der Erdbahn. Dafür liefert uns C ein Maß, das die Abweichung der elliptischen Erdbahn von einer Kreisbahn beschreibt. Weil die Exzentrizität mit e = 0,0167 klein ist, kann C in einer Reihenentwicklung berechnet werden. Dazu braucht man die sog. mittlere Anomalie M, was hier nicht weiter vertieft werden soll, nur soweit, M ist die Differenz aus L und . Die Reihe konvergiert sehr schnell, so dass man nur die ersten drei Glieder ausrechnen muss. Die Formel dafür lautet:
![\[C=(2e-\frac{e^3}{4})\cdot\sin M+\frac{5}{4}e^2\cdot\sin (2M)+\frac{13}{12}e^3\cdot\sin (3M)\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-8383e9095bd4cde8295450c7500ea435_l3.png "Rendered by QuickLaTeX.com")
In Excel ist diese Formel schon etwas umfangreicher und lautet
=(2*N24-N24^3/4)*SIN(N23)+5*N24^2/4*SIN(2*N23)+13*N24^3/12*SIN(3*N23).
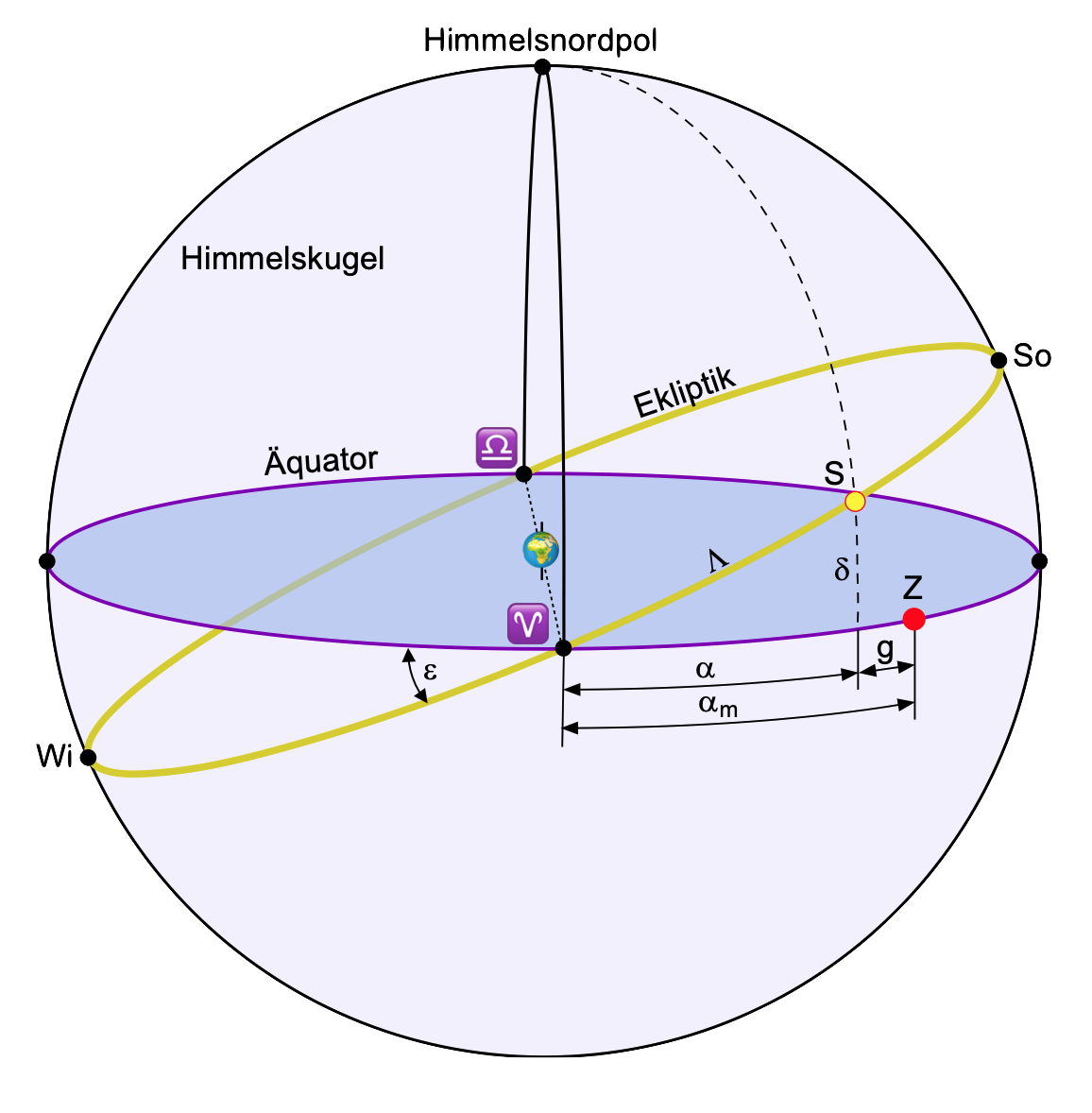
Damit kann die wahre Länge  ausgerechnet werden, die sich einfach als Summe der mittleren Länge L und C ergibt. Die mittlere Länge L ist der Weg, den eine Vergleichssonne Z längs des Himmelsäquators zurücklegt. Die wahre Länge ist der Weg, den die wahre Sonne auf der schrägstehenden Ekliptik derselben Himmelskugel zurücklegt. Beide Sonnen haben dabei die gleiche Geschwindigkeit auf einem gleichgroßen Kreis. Sie haben auch zum selben Zeitpunkt den Frühlingspunkt ♈︎ passiert. Bild 5 zeigt das Ganze grafisch. Darin ist
ausgerechnet werden, die sich einfach als Summe der mittleren Länge L und C ergibt. Die mittlere Länge L ist der Weg, den eine Vergleichssonne Z längs des Himmelsäquators zurücklegt. Die wahre Länge ist der Weg, den die wahre Sonne auf der schrägstehenden Ekliptik derselben Himmelskugel zurücklegt. Beide Sonnen haben dabei die gleiche Geschwindigkeit auf einem gleichgroßen Kreis. Sie haben auch zum selben Zeitpunkt den Frühlingspunkt ♈︎ passiert. Bild 5 zeigt das Ganze grafisch. Darin ist  die verkürzte Länge von L und ist die wahre, ebenfalls auf den Hauptwinkel verkürzte Länge. Wird der Ort der Sonne S längs ihres Himmelsmeridians auf den Himmelsäquator projiziert, dann entsteht ein rechtwinkliges Kugeldreieck, in dem die Länge von
die verkürzte Länge von L und ist die wahre, ebenfalls auf den Hauptwinkel verkürzte Länge. Wird der Ort der Sonne S längs ihres Himmelsmeridians auf den Himmelsäquator projiziert, dann entsteht ein rechtwinkliges Kugeldreieck, in dem die Länge von  berechnet werden kann. Die Differenz von und liefert dann die Zeitgleichung g.
berechnet werden kann. Die Differenz von und liefert dann die Zeitgleichung g.
In der Praxis macht die naheliegendste Gleichung zur Berechnung von
![\[\alpha=arctan(\tan\Lambda\cdot\cos\epsilon)\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-10ee851d83dfb856776d170d392652f3_l3.png "Rendered by QuickLaTeX.com")
einige Schwierigkeiten bei der Berücksichtigung der Vollkreisigkeit. Deshalb ist hier eine andere Gleichung angebracht, die auch sofort die Zeitgleichung liefert. Durch Anwendung eines Tangens-Additionstheorems auf  erhält man:
erhält man:
![\[g_{rad}=\arctan\frac{\tan \alpha_m-\tan \Lambda\cdot\cos \epsilon}{1+\tan \alpha_m\cdot\tan \Lambda\cdot\cos \epsilon}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-c0e79295d74ad655686fa33e109f8d26_l3.png "Rendered by QuickLaTeX.com")
In Excel schreibt sich das als:
=ARCTAN( (TAN(N20)-TAN(N26)*COS(N28)) /(1+TAN(N20)*TAN(N26)*COS(N28)))
Mit der Kenntnis der Zeitgleichung ist es nun ganz einfach, den Greenwich Stundenwinkel auszurechnen. Dieser ist definiert als

Hierin ist die Zahl 0,261799 das Bogenmaß der Geschwindigkeit der Sonne von 15°/h (15・ /180). Die Sonne braucht 12 h, um von 180° E auf 0° nach Greenwich zu kommen. Deshalb müssen 12 h addiert werden. Wird (ot + 12 h) größer als 24 h, dann startet die Sonne ab Greenwich den nächsten Umlauf und es müssen 24 h abgezogen werden, also wenn (ot + 12 h) > 24, dann muss (ot – 12 h) gerechnet werden. In Excel schreibt man dafür:
/180). Die Sonne braucht 12 h, um von 180° E auf 0° nach Greenwich zu kommen. Deshalb müssen 12 h addiert werden. Wird (ot + 12 h) größer als 24 h, dann startet die Sonne ab Greenwich den nächsten Umlauf und es müssen 24 h abgezogen werden, also wenn (ot + 12 h) > 24, dann muss (ot – 12 h) gerechnet werden. In Excel schreibt man dafür:
=WENN((ot*24+12)>24;N29+BOGENMASS(15)*(ot*24-12);N29+BOGENMASS(15)*(ot*24+12))
Das Ergebnis steht in Zelle N30 als Grt0, denn es müssen noch eventuelle Überträge beachtet werden. Wenn es in Greenwich 12:00:00 UT1 ist, dann kann der Bildpunkt der Sonne auch mal auf Grt = 357° stehen, wofür die beiden vorstehenden Formeln dann -3° ausrechnen würden. In dem Fall, dass Grt0 negativ ist, müssen also 2 addiert werden:
=WENN(N30<0;N30+2*PI();N30)
Wir haben jetzt den Grt im Bogenmaß und können ihn durch Multiplizieren mit 180/ ins Gradmaß umrechnen. In Excel geht das auch einfach mit der Formel = Grad(X) und schon erscheint der im Bogenmaß gegebene Winkel X im Gradmaß.
Die Berechnung der Deklination ist jetzt ganz einfach. Wir haben, wie im Bild 5 gezeigt, die wahre Länge und den Winkel der Schräge eines rechtwinkligen Kugeldreiecks und wollen ausrechnen. Das geht mit der Formel
 ,
,
die in Excel =ARCSIN(SIN(N26)*SIN(N28)) lautet. Auch hier kann der im Bogenmaß vorliegende Winkel ins Gradmaß umgerechnet werden, was grundsätzlich nur für Informationszwecke getan werden muss. Die folgende Standortberechnung arbeitet natürlich wieder mit den Bogenmaßen. Für die zweite Beobachtung gilt dann die zweite Spalte von O17 bis O34. Zur Unterscheidung sind dort die Variablen mit einem Apostroph gekennzeichnet.
Die erforderlichen Berechnungen für Grt und sind also wirklich kein Hexenwerk, wenn dazu die richtigen Mittel eingesetzt werden. Sie ist mit 14 einfachen, in einem Durchgang zu berechnenden Formeln getan, wozu ein normaler Computer, wie ihn jeder zu Hause hat nicht mal eine Millisekunde braucht. Genauso einfach ist dann auch die Berechnung eines versegelten Standortes, was im Folgenden dargelegt wird.
Die Gauß Methode
Johann Carl Friedrich Gauß war ohne Frage der berühmteste Mathematiker aller Zeiten. Er beschäftigte sich mit der Astronomie, aber auch mit der Landesvermessung. Dafür musste er auch Längengrade und Breitengrade bestimmen können.
Seit dem 16. Jahrhundert kennt man ein Dreiecksmodell, das aufzeigt, wie ein Standort aus den Höhen zweier Sterne oder den Höhen der Sonne in zwei unterschiedlichen Zeiten bestimmt werden kann. Das Problem war nur, dass niemand eine Berechnungsmöglichkeit für eine Beobachterposition finden konnte, die einfach genug ist, dass sie auch auf See angewendet werden kann. Für Mathematiker hingegen war es auch damals nicht unmöglich, Schritt für Schritt aus den gegebenen Daten und langwieriger Rechenarbeit eine Position zu berechnen.

Gauß ging einen anderen Weg, er transformierte die Zeichnung in ein Gleichungssystem, welches das vorliegende Dreiecksmodell komplett beschrieb und löste dann dieses Gleichungssystem mit den Mitteln der mathematischen Analyse. Das Ergebnis war ein Formelapparat, mit dem ein Standort aus zwei Gestirnshöhen einfach nur berechnet wird. Seine Formeln sind an Genialität nicht zu übertreffen. Doch leider verstand sie niemand. Sie waren wie der Ansatz viel zu abstrakt und hatten überhaupt keinen Bezug mehr zu den einzelnen Elementen des ursprünglichen Dreiecksmodells. Es war halt pure Mathematik. Auch die Seeleute konnten damit nichts anfangen. Außerdem waren für eine Lösung immer noch viel zu viele Logarithmen nötig gewesen, was auf eine langwierige Berechnung hinausgelaufen wäre.
Mit Elektronenrechnern ist das heute kein Thema mehr. Die Tabelle im Bild 6. zeigt eine Excel Rechentabelle, die in 17 Zeilen eine komplette Standortberechnung mit Versegelung durch zweifache Anwendung des Formelsatzes bewerkstelligt.
Mit P wird vorgegeben, ob ein Standort nördlich oder südlich von der Deklinationsbreite berechnet werden soll. Für einen nördlichen Standort ist P = 1 vorzugeben und für einen südlichen Standort P = -1. Die Vorgaben +1 oder -1 sind aber noch mit dem Vorzeichen der aktuellen Deklinationsbreite zu multiplizieren. Soll beispielsweise ein Standort nördlich der aktuellen Deklination berechnet werden, dann gilt zunächst P = 1 für Nord. Wenn zu diesem Zeitpunkt die Deklination südlich ist, dann muss P = 1 mit -1 für südliche Deklination multipliziert werden und damit gilt P = -1. Die Excel Formel zur Festlegeung von P lautet:
=WENN(C8=“N“;1;WENN(C8=“S“;-1;0))*VORZEICHEN(d).
Die null anstelle von 1 oder -1 erzeugt einen Fehler, der dazu führt, dass die Ergebnisfelder C25 bis H25 leer bleiben.
Die Analysis von Gauß liefert einen Formelapparat aus sechs Gleichungen. Darin sind die ersten vier Gleichungen die Substitionen F, V, W und G. Weil Gauß in seiner Analyse die Sonne während ihrer ersten Beobachtung auf dem Nullmeridian sieht, liefert die fünfte Gleichung mit  eine Basislänge. Diese ist positiv, wenn die Sonne während ihrer ersten Beobachtung östlich gesehen wird. Erfolgt die erste Beobachtung erst am Nachmittag, dann ist negativ. Somit ergibt sich die vollkreisige Länge
eine Basislänge. Diese ist positiv, wenn die Sonne während ihrer ersten Beobachtung östlich gesehen wird. Erfolgt die erste Beobachtung erst am Nachmittag, dann ist negativ. Somit ergibt sich die vollkreisige Länge  immer nur als Summe von Grt und . Der Formelapparat lautet:
immer nur als Summe von Grt und . Der Formelapparat lautet:
![\[F=\tan^{-1}\frac{\tan \delta'}{\cos (\theta)}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-88983145598ae18a4261c8dcaf56888f_l3.png "Rendered by QuickLaTeX.com")
![\[V=\tan^{-1}\frac{\cos F\cdot\tan \theta }{\sin (F-\delta)}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-2ac34f52a42f66835c008012c09c93cc_l3.png "Rendered by QuickLaTeX.com")
![\[W=P\cdot\cos^{-1}\Bigg[\frac{\cos V\cdot\tan h}{\tan (F-\delta)}\bigg(\frac{\sin h'\cdot\sin F}{\sin h\cdot\sin \delta'\cdot\cos(F-\delta)}-1\bigg)\Bigg]\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-fb9d04c8ae4da2ba93b448f6177086f4_l3.png "Rendered by QuickLaTeX.com")
![\[G=\tan^{-1}\frac{\tan h}{\cos (V - W)}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-ba8f9a187ab404423814b84ebee6a9e1_l3.png "Rendered by QuickLaTeX.com")
![\[\lambda_0=\tan^{-1}\frac{\cos G\cdot\tan (V-W)}{\sin (G-\delta)}\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-c380cd0c4852780c22d817dbbebcc0d9_l3.png "Rendered by QuickLaTeX.com")
![\[\varphi=\tan^{-1}\big(\cos \lambda_0\cdot\cot(G-\delta)\big)\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-99069be09a015617f6baf9fc319454d2_l3.png "Rendered by QuickLaTeX.com")
Hierin ist:
![\[\theta=Grt'-Grt\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-e93edfe07be05d7c36189382c4f10612_l3.png "Rendered by QuickLaTeX.com")
Diese Formeln stehen als Excel Formeln in den Zellen V10 bis V16. Wir müssen aber noch eine Versegelung einrechnen. Um das möglichst professionell zu erledigen, muss eine sog. Höhenanpassung vorgenommen werden. Dazu muss das Azimut berechnet werden (Gleichung 8 in „Das Zweihöhenproblem“). Das passiert in den Zellen V17 und V18. In der Zelle V19 erfolgt dann die Höhenanpassung mit:
![\[hs=h+\frac{\text{dmg}}{60}\cdot\cos (Az-\text{cmg})\]](https://zephir-yacht.com/wp-content/ql-cache/quicklatex.com-51e16153c5c1965e43a52e5f6f9f34a6_l3.png "Rendered by QuickLaTeX.com")
Hierin sind dmg = distance made good in NM und cmg = course made good.
Mit der auf den versegelten Standort angepassten Höhe hs wird dann der versegelte und damit aktuelle Standort berechnet, wozu die in den Zellen V12 bis V16 angewendeten Formeln kopiert und erneut angewendet werden, wobei in den kopierten Formeln h gegen hs auszutauschen ist. Den Längengrad erhält man durch Addition von  und Grt. Dieser ist in Zelle V24 als Stundenwinkel angegeben und muss noch auf die geografischen Längen in Ostgrade und Westgrade umdefiniert werden. Es sind Westgrade, wenn das Ergebnis kleiner als ist. Ist das Ergebnis größer als , dann ist es von 2 abzuziehen und es sind Ostgrade. Die Umwandlung vom Bogenmaß in Grade für eine Ergebnisanzeige erfolgt sowohl für den Breitengrad, als auch für den Längengrad mit der Excel Formel =GRAD(x) oder durch Multiplikation mit 180/, was für alle Ergebnisse und Zwischenergebnisse in der Spalte U erfolgt .
und Grt. Dieser ist in Zelle V24 als Stundenwinkel angegeben und muss noch auf die geografischen Längen in Ostgrade und Westgrade umdefiniert werden. Es sind Westgrade, wenn das Ergebnis kleiner als ist. Ist das Ergebnis größer als , dann ist es von 2 abzuziehen und es sind Ostgrade. Die Umwandlung vom Bogenmaß in Grade für eine Ergebnisanzeige erfolgt sowohl für den Breitengrad, als auch für den Längengrad mit der Excel Formel =GRAD(x) oder durch Multiplikation mit 180/, was für alle Ergebnisse und Zwischenergebnisse in der Spalte U erfolgt .
Damit Zweitbeobachtungen nicht nur mehrere Stunden in den Folgetag hinein möglich sind, sondern auch zwei oder sogar noch mehr Tage später nach einer Erstbeobachtung, muss P mit einem weiteren Logikausdruck multipliziert werden. Damit wird der Fall berücksichtigt, dass die Sonne der Zweitbeobachtung östlich von der Sonne der Erstbeobachtung liegt. Das ist beispielsweise dann der Fall, wenn eine erste Beobachtung um 14:00 UT erfolgt ist, der ganze folgende Tag bewölkt war und eine Zweitbeobachtung erst am Folgetag um 11:00 UT gemacht werden konnte. Natürlich kommt einer möglichst genauen Erfassung der Versegelung in diesem Fall eine größere Bedeutung zu. Der Term, mit dem P dann außerdem zu multiplizieren ist lautet:
WENN(UND(ot_<ot;(dat_+ot_-dat-ot)>0,4);-1;1)
Wenn also die Tageszeit einer zweiten Beobachtung kleiner ist, als die Tageszeit einer ersten Beobachtung und Die Zeit zwischen den Beobachtungen größer als etwa 10 Stunden (0,4 · 24 h), dann ist das Vorzeichen von P umzukehren.
Schiffsmittag
Der Ortsstundenwinkel LHA ist der Längengradunterschied vom Standortmeridian in westliche Richtung gehend bis zum Meridian des Bildpunkts. Rechnet man 360° – LHA, dann ist das umgekehrt der Längengradabstand, den die Sonne bis zum Schiffsort noch zurückzulegen hat. Teilen wir diesen Wert durch 15°/h, dann ist das die Zeit, bis der Bildpunkt den Meridian des Schiffsortes erreicht. Diese Zeit des Durchgangs der Sonne durch den Standortmeridian ist der Schiffsmittag. Man muss an Bord also immer (360° – LHA)/15° Stunden warten, bis Schiffsmittag ist. Daraus folgt dann, dass die Zeit des Schiffsmittags die aktuelle Uhrzeit plus dieser Wartezeit ist.
Mit Zeiten kann in Excel unterschiedlich kompliziert umgegangen werden. Weil dort per Definition 24 h = 1 d (Tag) sind, kann eine Tageszeit ganz einfach auch als Dezimalzahl formatiert werden. So steht in unserem Beispiel in der als Zeit formatierten Zelle G13 der Wert 11:25:06, die Zeit der ersten Beobachtung. Würde man diese Zelle mit der Maus auswählen und als Standardzahl formatieren, rechte Maustaste; Zellen formatieren … – Zahlen – Standard, dann würde in dieser Zelle die Zahl 0,475763888888889 stehen. Das ist ebenfalls eine Zeitangabe und bedeutet 0,475763888888889 Tag.
Die Wartezeit bis zum Mittag ist wie oben gezeigt (360° – LHA°)/15, also (360° – 338,811°)/15° h = 1,412586 h, was dannn 1,412586/24 = 0,0588577 Tag ist. Dazu wird jetzt die Beobachtungszeit von 0,47576389 addiert. Das Ergebnis ist dann 0,47576388 d oder in Zeit formatiert 12:49:51 UT1. Die Excelformel in Zelle C26, die mit D26 verbunden ist lautet trotz dieser Zahlenspielerei dann ganz einfach:
=ot+(360-V17)/15/24
Hierin ist die Variable ot die Observationszeit der ersten Beobachtung.
Zusatzinformationen
Beim praktischen Gebrauch dieses Tools muss eigentlich niemand wissen, was die Begriffe Deklination, Greenwichwinkel oder Ortsstundenwinkel bedeuten.

Ebenso muss niemand wissen, was ein Azimut ist oder worin der Unterschied zwischen der Sextantenablesung und einer beobachteten Höhe besteht. Trotzdem schadet es nicht, davon etwas zu verstehen und deshalb werden diese Werte in einer kleinen Tabelle ausgegeben, die im Bild 7 dargestellt ist. Für den einen oder anderen mag es ja vielleicht interessant sein, diese Daten zu sehen zu bekommen.
Die Angaben in dieser Tabelle erfolgen alle, genau wie bei der Ergebnisanzeige in den Zellen B29 bis G34, in Grad und Minuten. Diese Angaben werden aus dem errechneten Dezimalgrad gewonnen.
Warnmeldungen
Manchmal kann es unbeabsichtigt zu Falscheingaben kommen. Wird das nicht sofort erkannt, dann kann es schon eine Menge Zeit rauben, bis der Fehler gefunden wird. Fehlerausschriften können hier ganz hilfreich sein. Wenn bei der Standortwahl statt N oder S fälschlicherweise W oder E eingegeben wird, dann erscheint im Feld C9 die Warnausgabe „N oder S eingeben“. Wird ein falscher Sonnenrand eingegeben, so z. B. H oder L dann erscheint im Feld H5 das wort „ERROR“. die Excel Formeln für diese Zellen lauten für die Zelle C9:
=WENN(ODER(C8=“N“;C8=“S“);“ „;“N oder S eingeben“)
und für die Zelle H5:
=WENN(ODER(UND(H6=“O“;ODER(H7=“O“;H7=“U“));
UND(H6=“U“;ODER(H7=“O“;H7=“U“)))=WAHR;“ „;“ERROR“)
Weitere Fehlerausschriften gibt es auch, wenn eine Uhrzeit falsch eingegeben wurde.
Grafiken
Das Gauß Verfahren liefert als Ergebnis nur die Standortkoordinaten als Zahlen. Wenn man eine Grafik haben möchte, dann müsste man den errechneten Standort mittels zusätzlicher Software als Schiffsymbol in eine elektronische Vektorkarte übertragen, so wie das in der Satellitennavigation gemacht wird. In Excel kann eine Karte nur mit sehr großem Aufwand eingebracht werden. Es gibt nur die Möglichkeit, Grafiken in kartesischen Koordinaten darzustellen. Aber auch das kann interessant sein. Für die Erstellung der Grafiken wurden zwei neue Arbeitsblätter angelegt, wodurch sich die Dateigröße verdreifacht hat. Die erste Grafik gibt einen globalen Überblick.
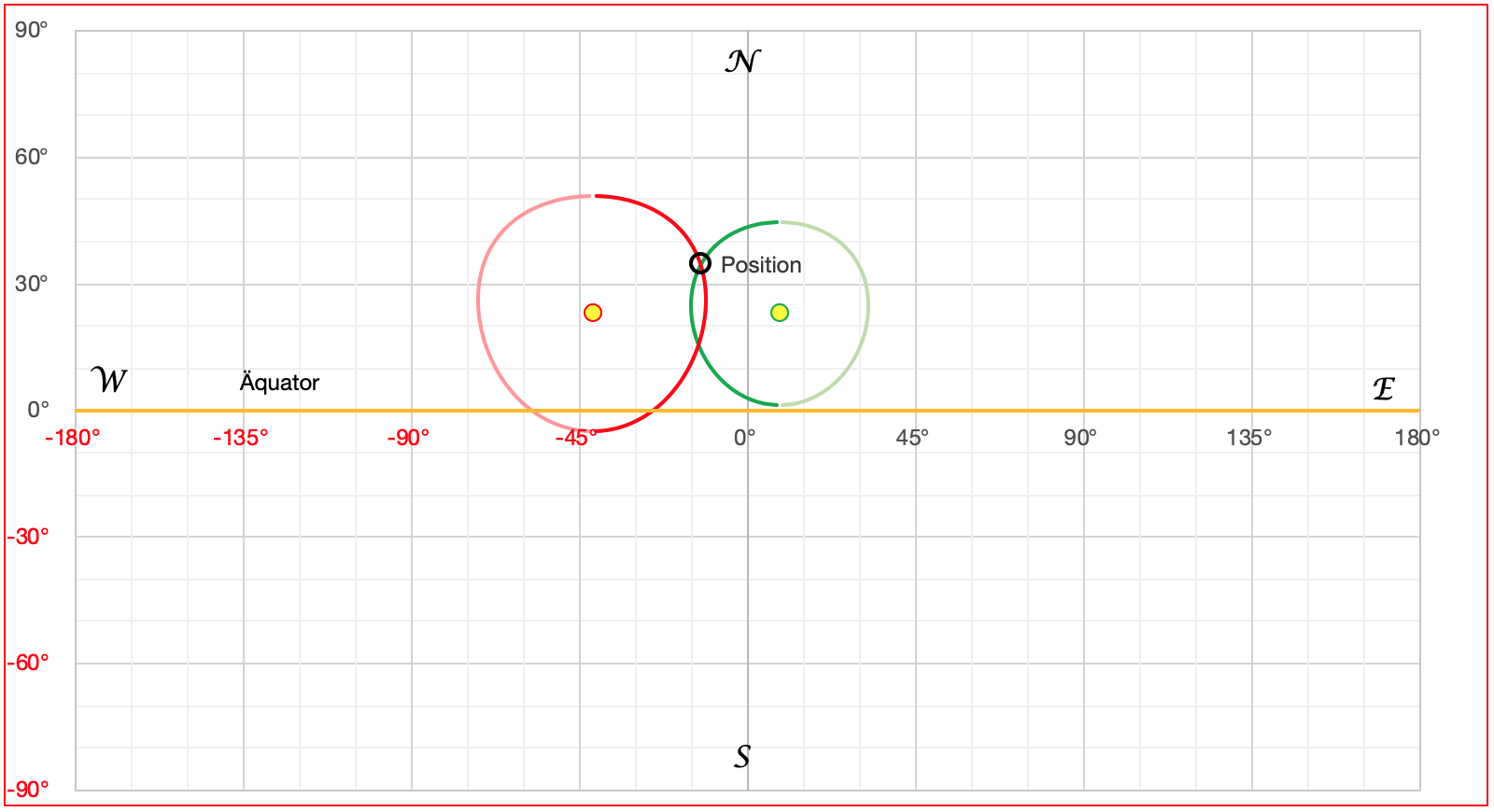
Eine zweite Grafik zeigt die Verhältnisse im Standortbereich.
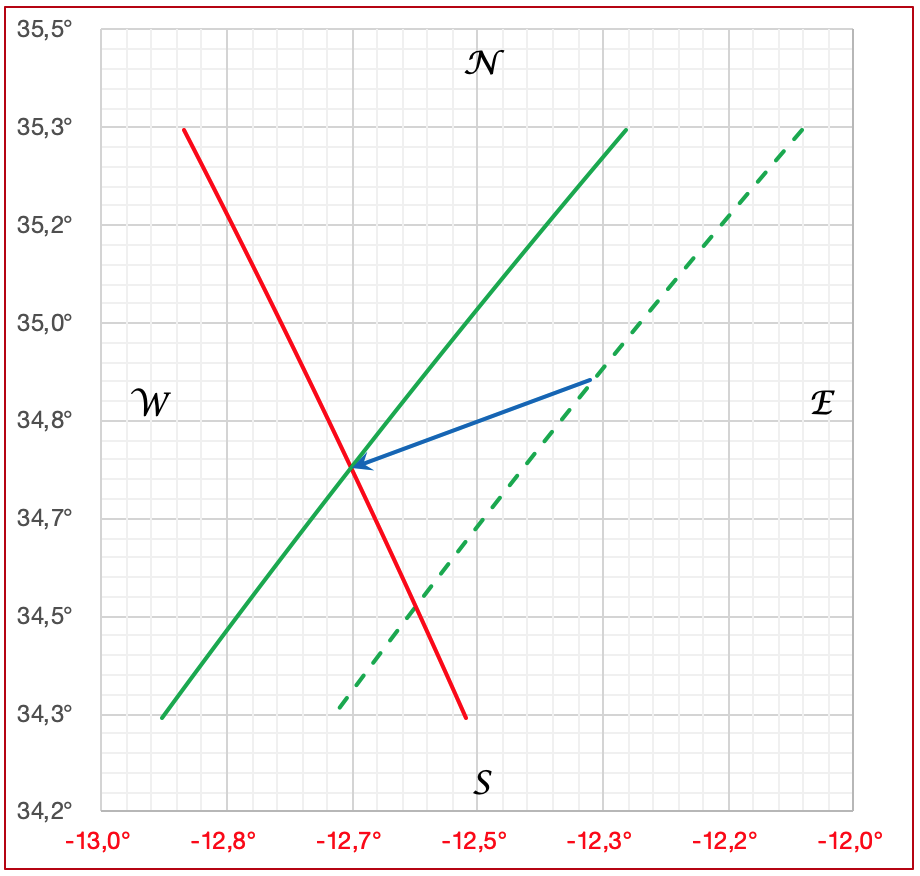
Als Standort werden natürlich die tatsächlichen Kreuzungen der Höhengleichen berechnet. Die verschiedenen Farben bedeuten:
grün gestrichelt: Höhengleiche aus Beobachtung 1
grün: versegelte Höhengleiche aus Beobachtung 1
rot: Höhengleiche aus Beobachtung 2
schwarz: Versegelungsvektor (DMG & CMG)
Um die Grafiken zu erzeugen, waren Rechentabellen nötig, deren Umfang weit über die Tabellen hinausgeht, die zur Standortberechnung nötig waren.
Arbeitsblätter schützen
Ein Schutz der Arbeitsblätter dient hier nicht der Geheimhaltung, sondern vielmehr dem Schutz der Datei vor einem selbst. Schnell ist in einer ungeschützten Datei der Inhalt einer Zelle überschrieben, die eine wichtige Formel beinhaltete. Die ist dann weg. Wenn Eingaben gemacht werden sollen, dann muss vor dem Blattschutz ausgewählt werden, welche Zellen nach einem Blattschutz beschreibbar bleiben sollen, denn man muss ja Datum, Uhrzeit, Sextanten Ablesung usw. eingeben können.
In der Beispieldatei sind das alle in der Eingaben Maske im Bild 2 grau hinterlegten Zellen. Man geht dazu folgendermaßen vor:
- gesamtes Arbeitsblatt auswählen (Dreieck in dem Feld oben links über der 1 und vor dem A anklicken)
- Bearbeiten; Zellen formatieren, Schutz – Haken bei Gesperrt und ausgeblendet setzen – OK
- alle beschreibbaren Zellen auswählen
- Bearbeiten; Zellen formatieren, Schutz – Haken bei Gesperrt und ausgeblendet entfernen – OK
Der Zellenschutz ist allerdings erst wirksam, nachdem auch das Arbeitsblatt geschützt wird. Zu diesem Zweck ist das Drop Down Menü „Überprüfen“ aufzurufen und darin das Symbol „Blatt schützen“. In dem daraufhin erscheinenden Auswahlfenster muss ein Kennwort eingegeben und in der Zeile darunter wiederholt werden. Außerdem kann ausgewählt werden, welche Elemente geschützt werden sollen. Hier genügt ein Haken bei „Nicht gesperrte Zellen auswählen“.
Aus optischen Gründen könnten vor dem Schutz in den Arbeitsblättern die Spalten J bis V bzw J bis R ausgewählt und ausgeblendet werden. Dazu diese Bereiche markieren, mit rechter Maustaste irgendwohin klicken und ausblenden wählen. Eine so vorbereitete Datei kann anschließend auf ein Smartphone oder Tablet geladen werden. Dort muss natürlich Excel installiert sein. Auf dem Display erscheint dann nur die Eingaben Maske gemäß Bild 2, in der die erforderlichen Eingaben gemacht werden können.Unter „Ansicht“ können auch Gitternetzlinien, Bearbeitungsleiste und Überschriften ausgeblendet werden.
Zur Standortbestimmung ist nichts weiter nötig, als Datum, Uhrzeit und Sextanten Ablesung zweier Beobachtungen der Sonne. Durch Eingabe von Distanz und Kurs einer Ortsveränderung zwischen den Beobachtungen, einer sogenannten Versegelung, wird die Genauigkeit erheblich besser. Diese sollte man durch Kopplung zwischen den Beobachtungen ermitteln. Die Grundeinstellungen dürften auch kein Problem darstellen. Die Augeshöhe ist von der Standhöhe auf dem Boot abhängig. Ob man nördlich oder südlich der Deklinationsbreite segelt wird wohl jeder wissen. Die Indexberichtigung findet man durch Beobachtung des Horizonts, wobei in den Strahlengang des Indexspiegels das schwächste Filter oder gar kein Filter eingeschwenkt wird. Man sieht dann zwei übereinanderliegende Horizonte, die mit der Mikrometerschraube in Deckung zu bringen sind. Der Wert der danach abgelesen werden kann ist der Indexfehler. Einzutragen ist die Berichtigung dieses Fehlers, also sein negativer Wert. Doch das ist die einzige Rechenaufgabe, die bei der Verwendung dieses Tools noch gemacht werden muss – eine Vorzeichenumkehr.
Resümee
Das war jetzt mal eine ganz andere Methode zur Standortberechnung, als sie die heutigen Segelschulen immer noch vermitteln. Die hier vorgestellte Mathematik war dann auch die Basis für die iOS– und Android App „Sun Navigation„. Diese Methoden können jedoch nur programmiert auf Rechnern oder Mobilgeräten umgesetzt werden. Ihre Benutzung ist, von der Anwendung eines Sextanten abgesehen, mit der Satellitennavigation vergleichbar.
Es mag sicher verwundern, dass nicht gleich zu Beginn der massenhaften Verbreitung von Computern auf analytische oder algebraische Verfahren zurückgegriffen wurde, denn eine bessere Lösung für ein Backup System für den Notfall ist nicht vorstellbar. Es wäre ein System für alle, zwar nur mit der Sonne als Navigationsgestirn, doch die meisten Handelskapitäne in früherer Zeit haben ihr Leben lang ausschließlich erfolgreich mit der Sonne navigiert. Das Argument, dass nur das Höhenverfahren mit Papier, Formeln oder Tafelwerken und Taschenrechner das Richtige für einen Navigationsnotfall sind, ist unsinnig. Alle, die das mal gelernt haben, können es nicht mehr anwenden. Außerdem wäre das aktuelle nautische Jahrbuch im Notfall sowieso nicht mehr an Bord. Ein Handy hat jeder, es müsste nur noch ein Solarlader angeschafft werden. Damit und einem Sextanten besteht volle Navigationssicherheit im Notfall. Das klassische Höhendifferenzverfahren ist ausschließlich etwas für die ganz wenigen Hobbynavigatoren-
<
p style=“text-align: justify;“>Die echte Gauß Methode wurde seit ihrer Veröffentlichung im Jahr 1812 nie wieder aufgegriffen. Sie fand keinen Eingang in die Seefahrt und war auch nie ein Thema in der Literatur, weder national noch international.
Doch seltsam genug wurde von nachfolgenden Autoren bis in die Neuzeit hinein eine – „Methode zur Berechnung eines Standortes direkt aus den Höhengleichen“ – als Gauß Methode bezeichnet. Dabei war diese Methode schon vor Gauß bekannt. Sie wurde in den Jahren 1778 bis 1790 mehrfach von verschiedenen Autoren beschrieben, unter anderem von Franz Xaver Freiherr von Zach, einem späteren Freund von Gauß und hat mit Gauß überhaupt nichts zu tun. Die Anwendung der Gauß Methode in Astro-Navigationsprogrammen dürfte die effektivsten Lösungen und kann auch leicht in elektronische Karten integriert werden.
links:
nach oben ♦ Die Sonne am Himmel ♦ Mittagsbreite und Chronometerlänge ♦ Gauß und das Zweihöhenproblem ♦ Thomas H. Sumner, Begründer der Standliniennavigation ♦ Die Methode des Marcq Saint Hilaire ♦ Ein wenig Sextantenkunde ♦ Sextantentest Mark 25 ♦ Downloads ♦ Home
2 Gedanken zu „Navigationsprogramm mit Excel selbst gemacht“
Was für eine eindrückliche Arbeit! Es leuchtet im Rückblick ein, dass etwa Bahnparameter und Ephemeriden der Sonne für die nautischen Tabellen mit Methoden berechnet wurden, welche für einen heutigen Computer zugänglich sind – eben auch in Form ihrer Excel Module.
Aber jemand musste das durchführen – Und einigermassen narrensicher umsetzen!
Lieber Herr Hoffrichter,
vielen Dank für Ihre Programme, Apps und für die schöne Übersicht über einen Teil der Geschichte der Astronavigation. Ich habe das nirgends so gut zusammengefasst gefunden. Danke vor allem für den Text über Gauß.
Gerade über den war ich sehr erstaunt und konnte es kaum glauben, dass man sich so „verrückte“ Substitutionen einfach mal so algebraisch überlegen kann. Vor allem V= U+W schien mir doch ganz wie eine Winkelsumme auszusehen, und ich rechnete ein bisschen herum. Dann stellte sich doch wirklich heraus, dass es geometrische Interpretationen von U, V, W, und die Bögen F und G gibt.
U, V und W sind die drei Winkel am Aufpunkt des ersten Gestirns. U ist der Winkel ZXP, W der Winkel X’XZ, V dementsprechend der Winkel X’XP. Die cot U/cot V ergeben sich beide aus dem Kotangenssatz
sin(alpha) * cot(gamma) = (cot c * sin b) – (cos b * cos(alpha)),
wenn man für alpha, gamma, b und c jeweils lambda/theta, U/V, 90°- delta/delta und 90°- phi/delta‘ einsetzt.
Der Bogen F ist das Lot vom zweiten Gestirn X‘ auf den Bogen PX. Den Fußpunkt dieses Lotes nennen wir K.
Wir fällen nun das Lot vom Zenit Z auf den Bogen PX. Den Fußpunkt nennen wir M. Die scheinbar abstrakte Hilfsgröße G definiert nun die Länge des Bogenabschnitts XM durch die Beziehung XM = 90° – G.
Beide Beziehungen ergeben sich direkt aus der Anwendung der Formeln für rechtwinklige sphärische Dreiecke auf die neu geschaffenen Dreiecke PX‘K und ZXM.
Wie bei Gauß lässt sich dann der tan F delta’ und theta berechnen, der tan V aus F, delta und theta, die +- cos W aus V, F, h, h‘, delta, delta‘ und theta, der tan G aus U und h, lambda aus G,U und delta und schließlich phi aus lambda, g und delta.
Bleibt für mich die große Frage, ob Gauß diese meiner Meinung nach nicht besonders abwegige Transformation des Problems auf den einen Gestirnsaufpunkt mit seinem Höhenkreis vor Augen gehabt, aber nicht aufgezeichnet, oder ob er das alles wirklich abstrakt algebraisch hingekriegt hat.
Als weitere Methode der genauen Berechnung von phi und lambda im „postmodernen“ Zeitalter der Computer hätte ich noch die vektorgeometrische vorzuschlagen, wobei man die beiden Ebenen, in denen die Höhenkreise jeweils liegen, sich in einer Geraden schneiden lässt, auf ihr den dem Standpunkt Z nächst gelegenen Punkt P0 berechnet, das auf die Länge 1 skalierte Kreuzprodukt der beiden Flächennormalen an diesen Punkt P0 anlegt und die richtigen Parameter t für die beiden Lösungen in die Geradengleichung einsetzt:
t = +- sqrt(1 – P0.P0).
Dann gibt man die Formeln
phi = asin(z) und lambda = atan2(y,x) in die Exceltabelle oder das Rechnerprogramm ein, wobei atan2 der in den meisten Programmen bekannte Vier-Quadranten-Arkustangens ist. Wenn das Programm auch noch das Kreuzprodukt als Funktion kennt, ist man hier schnell und numerisch sehr stabil, aber man kann natürlich auch die Formel dafür eintragen.
Herzliche Grüße aus Dresden.
Markus Hesse